
Bem vindo! Neste post eu falo sobre a engenharia reversa do testador de componentes GM328A. Eu desenhei os esquemas da placa e compilei um novo firmware para ela. Como bônus, eu também programei uma versão de Tetris usando Arduino.
Intro
Algum tempo atrás eu escrevi um artigo no qual programei um medidor LCR (indutância, capacitância e resistência) T3 para executar um clone do jogo t-rex do navegador chrome. Esse medidor LCR foi uma das ferramentas mais úteis que eu já tive, especialmente porque eu tenho o mesmo multímetro digital desde os 15 anos e este nem sequer mede capacitores. Infelizmente, o pobre testador não suportou o abuso constante (eu costumava usá-lo como crachá quando ia para conferências e tal) e o cabo do LCD quebrou. 
Eu procurei no eBay por um substituto, e o sucessor do T3, o T4 pareceu ter piorado em qualidade, sem falar que os preços do T3 subiram também. Felizmente eu encontrei algo ainda melhor, esta versão foi a GM328A.
![]() Este medidor LCR tem um LCD colorido, o que é ótimo no caso de eu continuar a usá-lo como um crachá. Ele também tem medição de frequência e tensão contínua, uma entrada de alimentação por fonte e saída PWM. Além disso, o que eu encontrei custou apenas em torno de 55 reais (com as taxas).
Este medidor LCR tem um LCD colorido, o que é ótimo no caso de eu continuar a usá-lo como um crachá. Ele também tem medição de frequência e tensão contínua, uma entrada de alimentação por fonte e saída PWM. Além disso, o que eu encontrei custou apenas em torno de 55 reais (com as taxas).
Dito isto, estes medidores LCR fazem ótimas placas de desenvolvimento, neste post detalho o processo que eu usei para desenhar os esquemas para este modelo e também mostro uma versão do Tetris que eu programei para ele. Os esforços de engenharia reversa aqui são principalmente relacionados à placa de circuito impresso e não ao firmware.
Antes de prosseguirmos, devo mencionar que todos esses testadores de transistores são baseados no mesmo projeto, originalmente criado por Markus Frejek e continuado por Karl-Heinz. Você pode encontrar informações e o código em mikrocontroller.net. Ainda assim, há diversas de diferentes variações do circuito vendido no eBay e afins, neste post eu fiz engenharia reversa dos esquemas apenas para esta placa.
Entao, para resumir. Neste projeto eu:
- Fiz a engenharia reversa da placa de circuito impresso;
- Corrigi um erro no circuito de medição de frequência;
- Ajustei e compilei o código do projeto AVR transitor tester para esta placa;
- Programei Tetris para a mesma.
Antes de qualquer coisa, achei que era uma boa ideia fazer o backup do firmware original, mas foi aí que eu encontrei o primeiro obstáculo. Embora a placa pareça amigável para hackers, até mesmo possuindo um soquete para o microcontrolador, a leitura de seu firmware foi bloqueada. Então, em vez de copiar o firmware original para o computador, substituí o microcontrolador. Desta forma, eu sempre poderia ter o firmware original e ainda usar a placa se eu cometesse algum engano.
Engenharia reversa da PCI do GM328A
Como esperado, o gm328a também é baseado no Atmega328 (daí o nome, imagino). Este é o mesmo microcontrolador usado em muitas placas Arduino (UNO, Nano, Mini).
Eu poderia ter dessoldado tudo para ver as trilhas da PCI claramente, mas eu não queria estragar o testador, então eu só usei a função de teste de continuidade do meu multímetro para checar onde os componentes estavam conectados. Essa é uma abordagem difícil, já que um componente pode ser conectado a muitos outros. Ainda assim, o circuito é pequeno o suficiente para não me causar uma dor de cabeça.
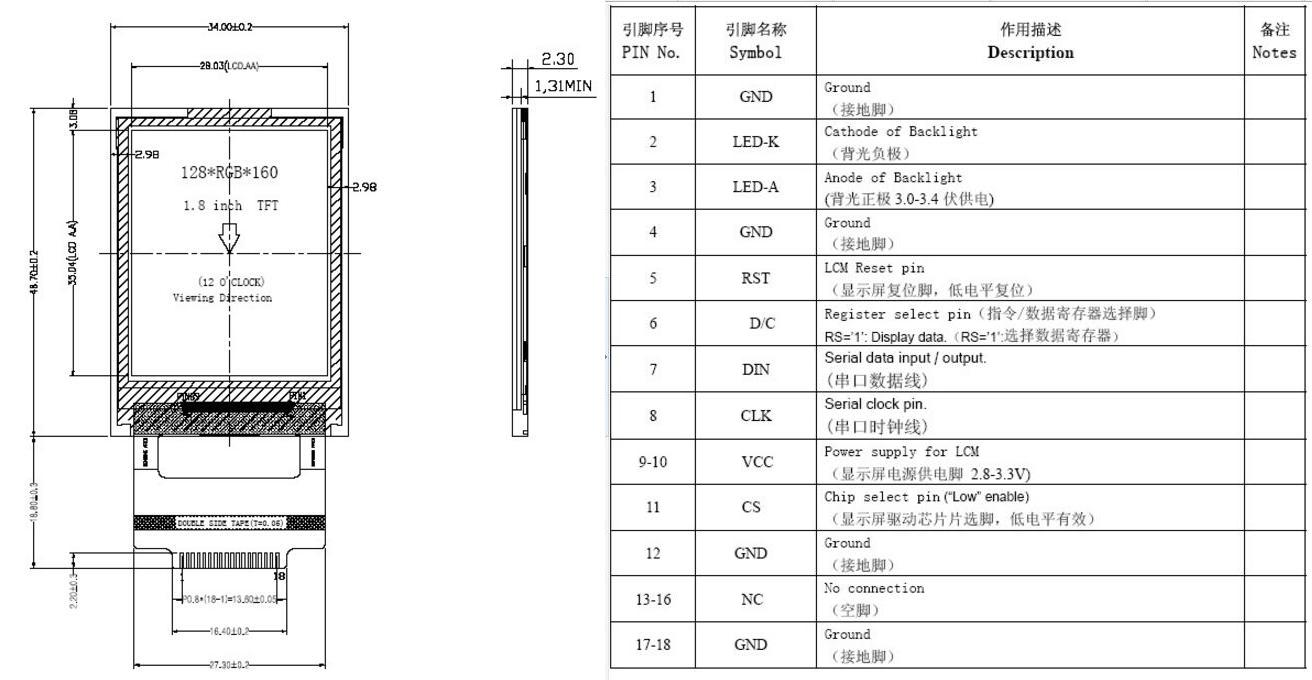
O bom é que muitos dos componentes passivos tinham valores impressos na placa. Eu também usei uma lupa para ver as trilha e as marcações dos CIs. Para alguns componentes, eu tive que procurar on-line por pinagens compatíveis. O display, por exemplo, eu tive que encontrá-lo on-line (é o ST7735) para descobrir sua pinagem.
 Depois de muitos testes, e pesquisas online, eu criei o seguinte esquema. Você pode clicar na imagem para aumentar o tamanho.
Depois de muitos testes, e pesquisas online, eu criei o seguinte esquema. Você pode clicar na imagem para aumentar o tamanho.

Eu fiz o melhor que pude com apenas o teste de continuidade. Pode não ser perfeito, mas é bom o suficiente para o seu propósito, que é dizer onde as partes importantes estão conectadas. você pode encontrar esse esquema no formato Eagle no repositório do projeto.
Bônus: Conserto no layout da placa
Enquanto estudava a placa, me deparei com algo estranho. Uma via na placa não estava conectada a nada. Pela aparência, parecia que a trilha vinda do pino PD4 deveria ser conectado ao circuito de medição de frequência. Mais tarde, eu verifiquei o firmware de Markus e PD4 era de fato o pino usado para medição de frequência lá também.

Eu tentei testar a função de medição de frequência para ver se estava faltando alguma coisa, mas a mesma não funcionou. Eu concluí que era de fato um erro no layout do PCB. Eu consertei o problema removendo a máscara de solda da via e conectando-a com solda ao resistor mais próximo.
 Depois disso, a medição de frequência funcionou como deveria.
Depois disso, a medição de frequência funcionou como deveria.
Novo firmware
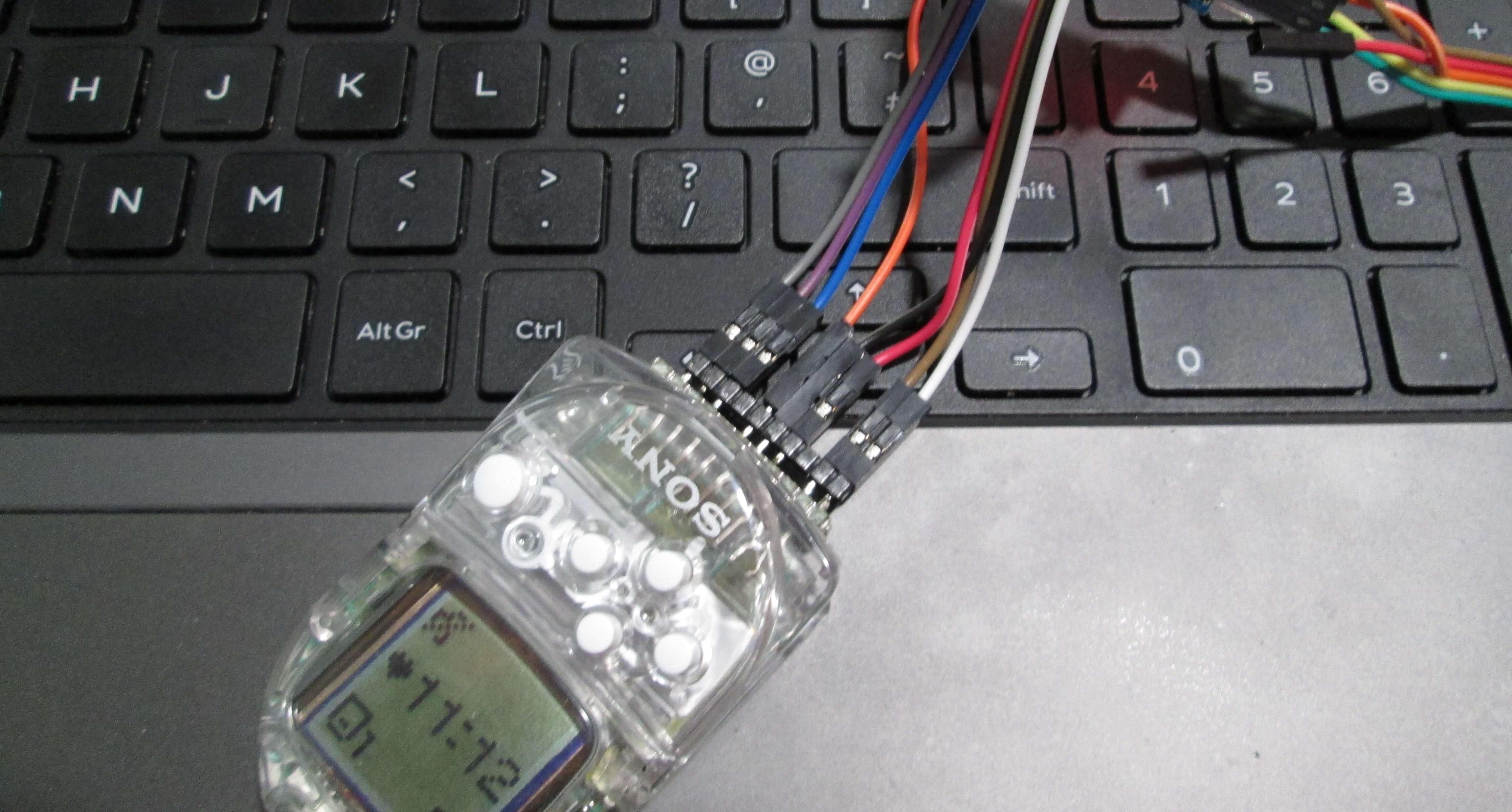
Diferentemente do T3, o GM328A não possui uma porta de gravação. Embora o MCU possua soquete e possa ser removido, isso é difícil de fazer e, com eu frequentemente entorno os pinos acidentalmente. Eu decidi então adicionar uma porta de gravação temporária para conectar diretamente a placa a um dos meus programadores USBASP.
 De qualquer forma, agora com as informações de pinagem da engenharia reversa em mãos, consegui compilar um novo firmware para a placa. Primeiramente eu baixei a versão 1.34 do código AVR transitortester em mikrocontroller.net. Você pode encontrar todas as versões do firmware do testador AVR aqui.
De qualquer forma, agora com as informações de pinagem da engenharia reversa em mãos, consegui compilar um novo firmware para a placa. Primeiramente eu baixei a versão 1.34 do código AVR transitortester em mikrocontroller.net. Você pode encontrar todas as versões do firmware do testador AVR aqui.
Então, eu apenas ajustei a pinagem de acordo com o esquema mostrado acima, selecionei o tipo de LCD e configurei as funções disponíveis e logo logo consegui fazer o testador funcionar com o novo código . Depois de alguns ajustes, comparei os resultados do novo código compilado com anterior o que veio com a placa. Estes resultados foram coletados após a calibração da placa para ambas as versões de firmware.

Você pode encontrar o firmware editado no repositório do github. Lá você também pode ver o histórico dos arquivos config.h, config328.h e Makefile para ver o que eu mudei em relação ao fork principal.

Novo firmware rodando na placa (transistor 2N3904)
Tetris
É claro que eu tinha que programar um jogo depois de chegar até aqui (mesmo que eu não saiba quase nada sobre programação de jogos). Se o código parece um código espaguete, você sabe por quê.
Este gm328a tem um encoder com um botão embutido. Então, isso é como ter três botões. Essa configuração seria muito boa para arkanoid ou talvez pong, mas eu escolhi o Tetris por duas razões. Primeiro, os níveis são os mesmos quando progredimos, a única coisa que muda é a velocidade em que os blocos caem e a pontuação. Segundo: Rafael disse no passado que era possível programar um tetris funcional em um único dia, então eu estava realmente ansioso para ver quanto tempo isso me levaria. Mesmo usando Arduino e bibliotecas, Demorei alguns dias.
Na última vez eu me “diverti muito” programando o jogo do t-rex usando apenas C. Eu decidi que desta vez eu usaria o Arduino. A propósito, eu traduzi toda a documetação do Arduino para o português, então eu meio que conheço as funções de cor.
Eu também usei algumas bibliotecas externas, listadas abaixo:
- GFX library da Adafruit
- ST7735 LCD library da Adafruit
- Rotary Encoder library por Matthias Hertel’s
Programar o jogo ainda foi um grande desafio. Para começar, o LCD e o encoder rotativo são conectados nos mesmos pinos, então eu tinha que alternar entre gravar dados no LCD ou verificar o encoder. Além disso, tinha que escrever dados no LCD muito rapidamente e monitorar o encoder no resto do tempo. Caso contrário, o jogo perderia as voltas do encoder. O fato de que comunicação SPI é feita por software não ajudou muito. Por causa disso, optei por usar quadrados muito simples para representar os tetrominos, e não perder tempo preenchendo-os também.
Para programar o gm328a usando o Arduino, eu apenas seleciono o Arduino Pro ou Pro mini no menu da placa na IDE. Então eu escolho Atmega328 (3.3V, 8Mhz). Observe que eu escolhi 3.3V mesmo se a placa for 5V. Tudo bem, já que eu não uso o ADC neste projeto e não há uma opção de 5V, 8Mhz. Dessa forma, não tenho que editar arquivos de placa fora da IDE ou qualquer coisa do tipo, pois detesto esse tipo de gambiarra. Para gravar o código eu uso um gravador USBASP com a opção Upload using programmer (Ctrl + Shift + U).
Eu não garanti o timing certo da última vez. Mas agora eu estudei um pouco, isso me levou a implementar um loop controlador por interrupção.
#include "game.h"
#include "sound.h"
void setup(void) {
gameInit();
}
void loop() {
gameTick();
drawBuffer();
waitInterrupt();
}
O loop do jogo é atualizado principalmente a cada 60Hz, enquanto a tela não é. Embora a tela seja SPI, ela é controlada por software através de GPIOs. Além disso, o MCU funciona em 8Mhz, enquanto ele poderia funcionar em 20MHz sem problemas. Assim, atualizar a tela, o que acontece somente quando algo precisa mudar algo na mesma, leva muito tempo comparado à computação do próximo estado do jogo. A função gameTick () verifica as entradas e calcula o próximo frame, você pode vê-lo abaixo:
void gameTick(void) {
side = getEncoderPos();
if (side == S_LEFT) tet.move(S_LEFT);
if (side == S_RIGHT) tet.move(S_RIGHT);
if (buttonWasPressed()) tet.rotate();
tet.update();
soundTick();
}
Como o encoder foi usado para entrada, girar ele faz mover a peça para os lados, enquanto apertar o botão faz o tetromino girar 90 graus. Um botão opcional pode ser conectado entre os pinos 1 e 3 do soquete de teste para atuar como um botão de drop, o botão que acelera a queda dos blocos.
Infelizmente eu tenho que desabilitar o encoder quando não o estiver usando. O encoder compartilha os pinos do display LCD e está ativo somente dentro da função waitInterrupt (). Esta função, juntamente com a rotina de serviço de interrupção do timer 1, pode ser vista abaixo:
void waitInterrupt(void) {
intFlag = 1;
enableEncoder();
while (intFlag) {
encoder.tick();
}
disableEncoder();
}
ISR(TIMER1_OVF_vect) { // Timer 1 interrupt service routine (60Hz)
TCNT1 = 65015; // preload timer
intFlag = 0;
}
Então, depois que o jogo é termina de calcular tudo para o frame atual, ele aguarda o próximo frame enquanto monitora o codificador. É óbvio que quando o LCD está sendo usado, algumas voltas do codificador serão perdidas, mas não há como contornar este problema.
Voltemos para o problema da tela demorando muito tempo para se comunicar. Para diminuir o tempo de comunicação o máximo possível, apenas as partes da tela que precisam ser atualizadas são reescritas no LCD. Por exemplo, vamos ver a função que move um tetromino:
void Tetromino::move(int side) {
...
//parte do código não relevante para este exemplo foi removida,
//veja o código completo no Github
...
//pinta as posições antigas do tetromino de preto
buffer[block[0]] = C_BLACK;
buffer[block[1]] = C_BLACK;
buffer[block[2]] = C_BLACK;
buffer[block[3]] = C_BLACK;
//adiciona esses blocos a fila
queueInsert(block[0]);
queueInsert(block[1]);
queueInsert(block[2]);
queueInsert(block[3]);
//atualiza a posição dos blocos
block[0] += side; block[1] += side; block[2] += side; block[3] += side;
// preenche as novas posições dos blocos com a cor da peça e adiciona a fila
// para serem desenhados na tela
buffer[block[0]] = color;
buffer[block[1]] = color;
buffer[block[2]] = color;
buffer[block[3]] = color;
queueInsert(block[0]);
queueInsert(block[1]);
queueInsert(block[2]);
queueInsert(block[3]);
}
}
Um tetromino é composto de quatro blocos, e esses blocos só podem ser colocados em 200 posições possíveis (o “campo” de tetris é 10×20 blocos). Essas 200 posições são mantidas na variável “Buffer”, que contém a cor de cada bloco. Assim, a posição antiga de um bloco do tetronimo ativo, que deve ser apagada, e a nova posição, que deve ser colorida, são adicionadas a uma fila. A cada quadro a função de atualização da tela verifica a fila e somente se houverem blocos presentes, eles são desenhados na tela:
//desenha apenas os blocos listados na fila, chamada a cadaframe
void drawBuffer(void) {
while (!queueIsEmpty()) {
int i = queueRemoveData();
tft.drawRect(X0 + (i % 10)*BLOCK_SIZE, Y0 + (i / 10)*BLOCK_SIZE, BLOCK_SIZE, BLOCK_SIZE, buffer[i]);
}
// se game over, mostra tela de gameover
if (gameover) {
showGameOverScreen();
}
}
O restante dos elementos da tela são atualizados assincronamente. De qualquer forma, quando estes são atualizados, o fluxo do jogo é geralmente bloqueado, então tudo bem. Por exemplo, quando uma linha é apagada, a pontuação é atualizada, todos os blocos acima dessa linha têm que descer e o jogador tem que esperar que o próximo novo tetromino apareça.
Eu não poderia terminar o jogo sem a icônica música korobeiniki, então tive que implementar o som. Para este propósito, eu uso o terminal de saída PWM. Essa parte foi muito simples, dado que eu já escrevi dezenas de sketches de músicas para o arduino como um exercício de leitura de partituras. A função tone() do Arduino pode gerar uma onda quadrada em segundo plano, usando o timer 2. Então eu simplesmente verifico cada frame se é a hora de mudar a nota sendo tocada ou pausar entre as notas.
/ notas da melodia seguidas da duração.
// um 4 significa uma semínima, um 8 uma colcheia , 16 semicolcheia, etc
// !!números negativos são usados para representar notas pontuadas,
// então -4 significa uma semínima pontuada, isto é, uma semínima mais uma colcheia!!
int melody[] = {
NOTE_E5, 4, NOTE_B4, 8, NOTE_C5, 8, NOTE_D5, 4, NOTE_C5, 8, NOTE_B4, 8,
NOTE_A4, 4, NOTE_A4, 8, NOTE_C5, 8, NOTE_E5, 4, NOTE_D5, 8, NOTE_C5, 8,
NOTE_B4, -4, NOTE_C5, 8, NOTE_D5, 4, NOTE_E5, 4,
NOTE_C5, 4, NOTE_A4, 4, NOTE_A4, 8, NOTE_A4, 4, NOTE_B4, 8, NOTE_C5, 8,
...
};
// retorna o numero de notas no vetor
int notes = sizeof(melody) / sizeof(melody[0]) / 2;
// isso calcula a duração da nota semibreve em ms (60s/tempo)*4semibreves
int wholenote = (60000 * 4) / tempo;
int divider = 0, noteDuration = 0;
unsigned int index = 0;
unsigned long next=0;
void soundTick(void) {
if (millis() > next) {
if (index < notes * 2) {
// para a geração de tom antes de mover pra próxima nota.
noTone(buzzer);
// calcula a duração de cada nota
divider = melody[index + 1];
if (divider > 0) {
// nota comum, apenas continua
noteDuration = (wholenote) / divider;
} else if (divider < 0) {
// notas ponteadas são representadas com números negativos!!
noteDuration = (wholenote) / abs(divider);
noteDuration *= 1.5; // aumenta a duração pela metade para notas pontuadas
}
next = millis() + noteDuration;
// apenas tocamos a nota por 90% da duração, deixando 10% como uma pausa
// Isso é feito para "separar" duas notas iguais tocadas em seguida
tone(buzzer, melody[index], noteDuration * 0.9);
index += 2;
} else {
index = 0;
next = millis();
}
}
}
Eu não vou discutir o código inteiro, do contrário este post se tornaria ainda mais longo. Você pode ver o código completo no Github. Não espere que seja bom, mas é bem comentado!
Abaixo deixo um pequeno vídeo do jogo rodando:
Ainda existem alguns bugs que raramente aparecem e são irritantes de se debugar. Mas não vou perder o sono, já que o jogo foi apenas uma prova de conceito e não o principal objetivo do projeto.
Por enquanto é isso. Obrigado por ler até aqui.
Até o próximo post o/



Salve Robson Couto…
Ficaria imensamente grato se você me dissesse qual IDE você usou para compilar a sua versão do software para o GM328. Estou brigando há dias com o CodeBlocks nas versões genéricas e especial para Arduino. Não vai…
Será que pode me ajudar ?
Obrigado,
Antonio Testa
Olá Antonio, não uso IDE. Apenas o avr-gcc (compilador para avr) + avr libc (biblioteca ) no linux.
Compilar esse tipo de projeto no windows é uma dor de cabeça (que eu evito).
Provavelemente é possível usar o Atmel studio para isso, mas não deve ser simples.
Recomendo que se precisa muito compilar o código, crie uma máquina virtual com ubuntu, instale os pacotes mencionados compile usando make no diretório.
Agora, se você apenas precisa de um arquivo hex já compilado, eu adicionei o mesmo na pasta firmware. Basta gravar no gm328a e deve funcionar.
Abraço
ôpa… Obrigado Robson. Infelizmente o seu .hex não rodou, apesar do meu GM328A ser idêntico ao seu, conforme as fotos do artigo. Faço o upload em um ATMega328PU usando um Arduino UNO e o seu BURN.bat devidamente alterado. O upload se dá normalmente. Este chip, ao ser instalado no GM328 mostra pontos aleatórios no display. Em seguida o display é limpo e depois disso nada mais acontece. Bem… Vou batalhar mais um pouco. Obrigado por tudo.
1 – Acredito que seja necessário alterar os fusebits do microcontrolador para que o mesmo funcione corretamente.
2 – Meu BURN.bat? Não conheço.
Hi Robson,
Googling around i find your impressive article on the reverse engineering of the GM328.
I wonder if you can help me in finding the right configuration (Makefile) for a clone i have. Looking at your schematic it seems it very simiral to your, the main difference is package format of the MCU.
Im faicing a problem with the screen that is blank. I tried different configurations but no one is working.
thank you for your support.
regards, storto
Hi Storto, sorry for the delay.
What happened? Did your tester stop working after you reprogrammed it? Or it never worked at all? Do you have a backup of the original program?
Anyways, maybe the pins are not correct on your project or the LCD is a different one. Could you replay with a link to a unit exactly like yours?
Best regards, Robson
Olá Robson queimei meu atmega 328pu dip vc sabe onde ou quem vende gravado? já com o código para multi testador diy? aquele modelo sem smd?
本网站 提供 海量的 成人内容,满足 成年访客 的 需求。
无论您喜欢 什么样的 的 影片,这里都 种类齐全。
所有 内容 都经过 严格审核,确保 高质量 的 观看体验。
舔阴
我们支持 不同平台 访问,包括 平板,随时随地 畅享内容。
加入我们,探索 无限精彩 的 两性空间。
本网站 提供 多样的 成人内容,满足 各类人群 的 兴趣。
无论您喜欢 什么样的 的 内容,这里都 应有尽有。
所有 资源 都经过 精心筛选,确保 高质量 的 视觉享受。
私人照片
我们支持 多种设备 访问,包括 平板,随时随地 畅享内容。
加入我们,探索 无限精彩 的 私密乐趣。
这个网站 提供 多样的 成人内容,满足 各类人群 的 需求。
无论您喜欢 什么样的 的 视频,这里都 一应俱全。
所有 内容 都经过 严格审核,确保 高品质 的 观看体验。
色情照片
我们支持 各种终端 访问,包括 平板,随时随地 自由浏览。
加入我们,探索 激情时刻 的 两性空间。
本站 提供 多样的 成人资源,满足 各类人群 的 喜好。
无论您喜欢 什么样的 的 视频,这里都 一应俱全。
所有 内容 都经过 严格审核,确保 高品质 的 浏览感受。
性别
我们支持 多种设备 访问,包括 手机,随时随地 自由浏览。
加入我们,探索 无限精彩 的 两性空间。
本网站 提供 海量的 成人资源,满足 不同用户 的 需求。
无论您喜欢 什么样的 的 内容,这里都 种类齐全。
所有 内容 都经过 严格审核,确保 高品质 的 视觉享受。
性别
我们支持 多种设备 访问,包括 电脑,随时随地 自由浏览。
加入我们,探索 绝妙体验 的 成人世界。
这个网站 提供 多样的 成人内容,满足 成年访客 的 喜好。
无论您喜欢 哪种类型 的 内容,这里都 种类齐全。
所有 资源 都经过 精心筛选,确保 高质量 的 视觉享受。
性别
我们支持 各种终端 访问,包括 电脑,随时随地 自由浏览。
加入我们,探索 绝妙体验 的 私密乐趣。
这个网站 提供 丰富的 成人材料,满足 成年访客 的 兴趣。
无论您喜欢 什么样的 的 影片,这里都 一应俱全。
所有 内容 都经过 专业整理,确保 高品质 的 视觉享受。
舔阴
我们支持 各种终端 访问,包括 平板,随时随地 自由浏览。
加入我们,探索 无限精彩 的 私密乐趣。
本网站 提供 丰富的 成人内容,满足 成年访客 的 兴趣。
无论您喜欢 哪种类型 的 视频,这里都 应有尽有。
所有 资源 都经过 严格审核,确保 高质量 的 浏览感受。
口交
我们支持 不同平台 访问,包括 电脑,随时随地 畅享内容。
加入我们,探索 绝妙体验 的 两性空间。
本网站 提供 海量的 成人材料,满足 不同用户 的 兴趣。
无论您喜欢 哪一类 的 影片,这里都 种类齐全。
所有 材料 都经过 精心筛选,确保 高质量 的 浏览感受。
性别
我们支持 各种终端 访问,包括 电脑,随时随地 畅享内容。
加入我们,探索 无限精彩 的 成人世界。
Dear Sir/ma,
We are a financial services and advisory company, and our investors have mandated us to seek business opportunities and projects for potential funding and debt capital financing.
Please note that our investors are based in the Gulf region and are interested in investing in viable business ventures or projects that you are currently executing or plan to undertake as a means of expanding your global portfolio.
We are eager to have more discussions on this subject in any way you believe suitable.
Please get in touch with me on my direct email: michaelanthony@capitalltduk.com
Looking forward to working with you.
Yours faithfully,
Michael Anthony
(Financial Advisor)
Capital Ltd Consulting LLC
I loved as much as you will receive carried out right here The sketch is attractive your authored material stylish nonetheless you command get got an impatience over that you wish be delivering the following unwell unquestionably come more formerly again since exactly the same nearly a lot often inside case you shield this hike
本网站 提供 海量的 成人内容,满足 成年访客 的 喜好。
无论您喜欢 哪一类 的 视频,这里都 应有尽有。
所有 内容 都经过 严格审核,确保 高质量 的 浏览感受。
色情照片
我们支持 不同平台 访问,包括 电脑,随时随地 畅享内容。
加入我们,探索 无限精彩 的 两性空间。
Надежный электрик по низкой цене в Москве
Вызвать электрика недорого [url=https://elektrik-master-msk.ru/]https://elektrik-master-msk.ru/[/url] .
本站 提供 丰富的 成人内容,满足 成年访客 的 兴趣。
无论您喜欢 哪种类型 的 影片,这里都 应有尽有。
所有 材料 都经过 专业整理,确保 高清晰 的 浏览感受。
色情照片
我们支持 各种终端 访问,包括 电脑,随时随地 畅享内容。
加入我们,探索 激情时刻 的 两性空间。
На этом сайте вы найдете вспомогательные материалы для абитуриентов.
Все школьные дисциплины в одном месте включая естественные науки.
Готовьтесь к ЕГЭ и ОГЭ благодаря интерактивным заданиям.
https://mamuli.club/gdz-dlya-shkolnika-razbiraemsya-s-vygodoy-i-podvodnymi-kamnyami
Образцы задач помогут разобраться с темой.
Регистрация не требуется для удобства обучения.
Применяйте на уроках и достигайте отличных результатов.
купить цветы в спб с доставкой купить живые цветы
заказ цветов с доставкой цветы спб купить рядом
graduated from Elizabeth’s St. Mary of the Assumption [url=http://www.en.wikipedia.org/wiki/Chuck_Feeney]http://www.en.wikipedia.org/wiki/Chuck_Feeney[/url] .
Свежие актуальные Самые свежие новости из мира спорта со всего мира. Результаты матчей, интервью, аналитика, расписание игр и обзоры соревнований. Будьте в курсе главных событий каждый день!
Микрозаймы онлайн https://kskredit.ru на карту — быстрое оформление, без справок и поручителей. Получите деньги за 5 минут, круглосуточно и без отказа. Доступны займы с любой кредитной историей.
Хочешь больше денег https://mfokapital.ru Изучай инвестиции, учись зарабатывать, управляй финансами, торгуй на Форекс и используй магию денег. Рабочие схемы, ритуалы, лайфхаки и инструкции — путь к финансовой независимости начинается здесь!
Быстрые микрозаймы https://clover-finance.ru без отказа — деньги онлайн за 5 минут. Минимум документов, максимум удобства. Получите займ с любой кредитной историей.
Сделай сам как сделать современный ремонт Ремонт квартиры и дома своими руками: стены, пол, потолок, сантехника, электрика и отделка. Всё, что нужно — в одном месте: от выбора материалов до финального штриха. Экономьте с умом!
КПК «Доверие» https://bankingsmp.ru надежный кредитно-потребительский кооператив. Выгодные сбережения и доступные займы для пайщиков. Прозрачные условия, высокая доходность, финансовая стабильность и юридическая безопасность.
Ваш финансовый гид https://kreditandbanks.ru — подбираем лучшие предложения по кредитам, займам и банковским продуктам. Рейтинг МФО, советы по улучшению КИ, юридическая информация и онлайн-сервисы.
Займы под залог https://srochnyye-zaymy.ru недвижимости — быстрые деньги на любые цели. Оформление от 1 дня, без справок и поручителей. Одобрение до 90%, выгодные условия, честные проценты. Квартира или дом остаются в вашей собственности.
baby boy balloons dubai balloons and cake dubai
resume engineer experienced resume for engineer student
Бъдете различна всеки ден с модерните дамски комплекти в нашия каталог
комплекти дрехи за жени [url=https://komplekti-za-jheni.com]https://komplekti-za-jheni.com[/url] .
Услуги массажа Ивантеевка — здоровье, отдых и красота. Лечебный, баночный, лимфодренажный, расслабляющий и косметический массаж. Сертифицированнй мастер, удобное расположение, результат с первого раза.
Архитектурные стили и современные тренды в строительстве деревянных домов
строительство деревянных коттеджей под ключ [url=http://stroitelstvo-derevyannyh-domov78.ru/]http://stroitelstvo-derevyannyh-domov78.ru/[/url] .
Всё о городе городской портал города Ханты-Мансийск: свежие новости, события, справочник, расписания, культура, спорт, вакансии и объявления на одном городском портале.
Дамски блузи с мека текстура и изискано усещане
дамски блузи [url=http://www.bluzi-damski.com]http://www.bluzi-damski.com[/url] .
Здесь вы найдете мессенджер-бот “Глаз Бога”, позволяющий найти данные о гражданине по публичным данным.
Бот работает по ФИО, анализируя актуальные базы в Рунете. Благодаря ему доступны бесплатный поиск и глубокий сбор по фото.
Платформа проверен на август 2024 и включает аудио-материалы. Сервис сможет узнать данные в открытых базах и предоставит результаты за секунды.
Глаз Бога glazboga.net
Данный бот — выбор при поиске персон через Telegram.
Здесь можно получить Telegram-бот “Глаз Бога”, что собрать данные по человеку через открытые базы.
Сервис функционирует по номеру телефона, обрабатывая доступные данные онлайн. Благодаря ему осуществляется 5 бесплатных проверок и детальный анализ по запросу.
Платформа актуален согласно последним данным и поддерживает мультимедийные данные. Сервис поможет проверить личность по госреестрам и отобразит сведения мгновенно.
бот Глаз Бога
Данный бот — выбор в анализе людей онлайн.
В этом ресурсе вы можете получить доступ к боту “Глаз Бога” , который позволяет собрать всю информацию о любом человеке из общедоступных баз .
Данный сервис осуществляет проверку ФИО и показывает информацию из онлайн-платформ.
С его помощью можно проверить личность через специализированную платформу, используя фотографию в качестве ключевого параметра.
пробив человека по фото
Система “Глаз Бога” автоматически собирает информацию из проверенных ресурсов, формируя структурированные данные .
Клиенты бота получают пробный доступ для проверки эффективности.
Решение постоянно развивается, сохраняя высокую точность в соответствии с законодательством РФ.
В этом ресурсе вы можете получить доступ к боту “Глаз Бога” , который может получить всю информацию о любом человеке из открытых источников .
Уникальный бот осуществляет проверку ФИО и предоставляет детали из соцсетей .
С его помощью можно узнать контакты через официальный сервис , используя имя и фамилию в качестве начальных данных .
пробить по телефону
Технология “Глаз Бога” автоматически обрабатывает информацию из проверенных ресурсов, формируя структурированные данные .
Клиенты бота получают пробный доступ для ознакомления с функционалом .
Решение постоянно развивается, сохраняя высокую точность в соответствии с стандартами безопасности .
Мир полон тайн https://phenoma.ru читайте статьи о малоизученных феноменах, которые ставят науку в тупик. Аномальные явления, редкие болезни, загадки космоса и сознания. Доступно, интересно, с научным подходом.
resume software engineer google resume ai engineer
Читайте о необычном http://phenoma.ru научно-популярные статьи о феноменах, которые до сих пор не имеют однозначных объяснений. Психология, физика, биология, космос — самые интересные загадки в одном разделе.
Услуги клининга для юридических лиц с официальными договорами
сайт клининга [url=https://www.kliningovaya-kompaniya0.ru/]https://www.kliningovaya-kompaniya0.ru/[/url] .
Подарок к юбилею или свадьбе — аренда яхты с сюрпризом
аренда яхт сочи [url=https://www.arenda-yahty-sochi23.ru]https://www.arenda-yahty-sochi23.ru[/url] .
Searching for exclusive 1xBet promo codes? This site offers working promotional offers like 1XRUN200 for registrations in 2025. Get €1500 + 150 FS as a welcome bonus.
Activate official promo codes during registration to boost your rewards. Benefit from no-deposit bonuses and exclusive deals tailored for sports betting.
Find monthly updated codes for 1xBet Kazakhstan with fast withdrawals.
Every promotional code is checked for validity.
Grab exclusive bonuses like 1x_12121 to double your funds.
Valid for first-time deposits only.
http://hikvisiondb.webcam/index.php?title=thorsennapier4079Stay ahead with top bonuses – apply codes like 1XRUN200 at checkout.
Experience smooth benefits with easy redemption.
Searching for exclusive 1xBet promo codes? Our platform offers verified promotional offers like 1x_12121 for new users in 2024. Claim up to 32,500 RUB as a welcome bonus.
Use official promo codes during registration to maximize your bonuses. Enjoy risk-free bets and special promotions tailored for sports betting.
Discover daily updated codes for global users with guaranteed payouts.
All voucher is checked for validity.
Don’t miss exclusive bonuses like 1x_12121 to increase winnings.
Valid for first-time deposits only.
https://highkeysocial.com/story5181368/unlocking-1xbet-promo-codes-for-enhanced-betting-in-multiple-countriesKeep updated with 1xBet’s best promotions – enter codes like 1x_12121 at checkout.
Experience smooth rewards with easy redemption.
аккаунты стим бесплатно акк стим бесплатно
how long should an engineering resume be resume electronics engineer
общие аккаунты steam http://t.me/Burger_Game
Здесь вы найдете сервис “Глаз Бога”, что проверить данные о человеке через открытые базы.
Сервис работает по фото, обрабатывая доступные данные в сети. С его помощью можно получить пять пробивов и полный отчет по запросу.
Платформа проверен согласно последним данным и поддерживает аудио-материалы. Сервис поможет найти профили по госреестрам и предоставит результаты в режиме реального времени.
glazboga.net
Это бот — выбор при поиске людей удаленно.
Прямо здесь можно получить сервис “Глаз Бога”, что проверить всю информацию о гражданине через открытые базы.
Инструмент функционирует по фото, обрабатывая актуальные базы онлайн. Благодаря ему можно получить бесплатный поиск и глубокий сбор по имени.
Сервис актуален на август 2024 и включает фото и видео. Сервис сможет проверить личность по госреестрам и отобразит информацию мгновенно.
https://glazboga.net/
Данный бот — выбор при поиске людей онлайн.
Научно-популярный сайт https://phenoma.ru — малоизвестные факты, редкие феномены, тайны природы и сознания. Гипотезы, наблюдения и исследования — всё, что будоражит воображение и вдохновляет на поиски ответов.
На данном сайте можно получить мессенджер-бот “Глаз Бога”, что собрать всю информацию о человеке из открытых источников.
Сервис функционирует по ФИО, обрабатывая публичные материалы онлайн. С его помощью осуществляется бесплатный поиск и глубокий сбор по запросу.
Платформа обновлен согласно последним данным и поддерживает аудио-материалы. Глаз Бога гарантирует узнать данные в соцсетях и покажет результаты мгновенно.
https://glazboga.net/
Данный инструмент — идеальное решение для проверки людей удаленно.
resume for engineer student https://resumes-engineers.com
Долой суету: аренда яхты — это ваше пространство для релакса
яхты сочи аренда [url=https://arenda-yahty-sochi23.ru]https://arenda-yahty-sochi23.ru[/url] .
One more issue is really that video gaming became one of the all-time greatest forms of recreation for people of nearly every age. Kids play video games, and also adults do, too. Your XBox 360 is among the favorite gaming systems for many who love to have hundreds of activities available to them, and who like to learn live with other folks all over the world. Thank you for sharing your notions. Mauricio Forner
Гагры в разгар сезона — отдых, который запоминается надолго
гагры отдых [url=http://otdyh-gagry.ru/]http://otdyh-gagry.ru/[/url] .
На данном сайте вы найдете сервис “Глаз Бога”, что собрать сведения о гражданине через открытые базы.
Инструмент активно ищет по номеру телефона, обрабатывая доступные данные в сети. Через бота осуществляется 5 бесплатных проверок и детальный анализ по фото.
Инструмент обновлен на 2025 год и включает аудио-материалы. Бот сможет узнать данные в соцсетях и покажет результаты в режиме реального времени.
https://glazboga.net/
Данный сервис — выбор для проверки людей через Telegram.
В этом ресурсе вы можете отыскать боту “Глаз Бога” , который способен собрать всю информацию о любом человеке из общедоступных баз .
Данный сервис осуществляет анализ фото и предоставляет детали из государственных реестров .
С его помощью можно проверить личность через Telegram-бот , используя автомобильный номер в качестве начальных данных .
пробив по снилс
Система “Глаз Бога” автоматически анализирует информацию из множества источников , формируя исчерпывающий результат.
Подписчики бота получают пробный доступ для проверки эффективности.
Сервис постоянно обновляется , сохраняя актуальность данных в соответствии с стандартами безопасности .
В этом ресурсе вы можете отыскать боту “Глаз Бога” , который позволяет получить всю информацию о любом человеке из открытых источников .
Уникальный бот осуществляет анализ фото и предоставляет детали из соцсетей .
С его помощью можно пробить данные через Telegram-бот , используя имя и фамилию в качестве ключевого параметра.
поиск по номеру
Алгоритм “Глаз Бога” автоматически обрабатывает информацию из проверенных ресурсов, формируя подробный отчет .
Пользователи бота получают ограниченное тестирование для проверки эффективности.
Сервис постоянно совершенствуется , сохраняя актуальность данных в соответствии с стандартами безопасности .
888starz agent [url=www.888starz-official.com]888starz agent[/url] .
Актуальные новости https://komandor-povolje.ru — политика, экономика, общество, культура и события стран постсоветского пространства, Европы и Азии. Объективно, оперативно и без лишнего — вся Евразия в одном месте.
Юрист Онлайн https://juristonline.com квалифицированная юридическая помощь и консультации 24/7. Решение правовых вопросов любой сложности: семейные, жилищные, трудовые, гражданские дела. Бесплатная первичная консультация.
Мы восстанавливаем russiahelp.com даже сложные поломки.
Дом из контейнера https://russiahelp.com под ключ — мобильное, экологичное и бюджетное жильё. Индивидуальные проекты, внутренняя отделка, электрика, сантехника и монтаж
Загадки Вселенной https://phenoma.ru паранормальные явления, нестандартные гипотезы и научные парадоксы — всё это на Phenoma.ru
Сайт знакомств https://rutiti.ru для серьёзных отношений, дружбы и общения. Реальные анкеты, удобный поиск, быстрый старт. Встречайте новых людей, находите свою любовь и начинайте общение уже сегодня.
В этом ресурсе вы можете отыскать боту “Глаз Бога” , который позволяет проанализировать всю информацию о любом человеке из открытых источников .
Данный сервис осуществляет анализ фото и показывает информацию из онлайн-платформ.
С его помощью можно пробить данные через специализированную платформу, используя автомобильный номер в качестве ключевого параметра.
пробив по паспорту
Технология “Глаз Бога” автоматически обрабатывает информацию из открытых баз , формируя исчерпывающий результат.
Пользователи бота получают ограниченное тестирование для ознакомления с функционалом .
Платформа постоянно развивается, сохраняя высокую точность в соответствии с требованиями времени .
PC application steam account authenticator replacing the mobile Steam Guard. Confirm logins, trades, and transactions in Steam directly from your computer. Support for multiple accounts, security, and backup.
Steam Guard for PC — steam authenticator. Ideal for those who trade, play and do not want to depend on a smartphone. Two-factor protection and convenient security management on Windows.
No more phone needed! download steam desktop authenticator lets you use Steam Guard right on your computer. Quickly confirm transactions, access 2FA codes, and conveniently manage security.
Агентство недвижимости https://metropolis-estate.ru покупка, продажа и аренда квартир, домов, коммерческих объектов. Полное сопровождение сделок, юридическая безопасность, помощь в оформлении ипотеки.
Квартиры посуточно https://kvartiry-posutochno19.ru в Абакане — от эконом до комфорт-класса. Уютное жильё в центре и районах города. Чистота, удобства, всё для комфортного проживания.
СРО УН «КИТ» https://sro-kit.ru саморегулируемая организация для строителей, проектировщиков и изыскателей. Оформление допуска СРО, вступление под ключ, юридическое сопровождение, помощь в подготовке документов.
Ремонт квартир https://berlin-remont.ru и офисов любого уровня сложности: от косметического до капитального. Современные материалы, опытные мастера, прозрачные сметы. Чисто, быстро, по разумной цене.
Ремонт квартир https://remont-kvartir-novo.ru под ключ в новостройках — от черновой отделки до полной готовности. Дизайн, материалы, инженерия, меблировка.
Ремонт квартир https://remont-otdelka-mo.ru любой сложности — от косметического до капитального. Современные материалы, опытные мастера, строгие сроки. Работаем по договору с гарантиями.
Webseite cvzen.de ist Ihr Partner fur professionelle Karriereunterstutzung – mit ma?geschneiderten Lebenslaufen, ATS-Optimierung, LinkedIn-Profilen, Anschreiben, KI-Headshots, Interviewvorbereitung und mehr. Starten Sie Ihre Karriere neu – gezielt, individuell und erfolgreich.
sitio web tavoq.es es tu aliado en el crecimiento profesional. Ofrecemos CVs personalizados, optimizacion ATS, cartas de presentacion, perfiles de LinkedIn, fotos profesionales con IA, preparacion para entrevistas y mas. Impulsa tu carrera con soluciones adaptadas a ti.
Здесь вы можете найти боту “Глаз Бога” , который может собрать всю информацию о любом человеке из общедоступных баз .
Уникальный бот осуществляет поиск по номеру телефона и раскрывает данные из онлайн-платформ.
С его помощью можно пробить данные через Telegram-бот , используя имя и фамилию в качестве ключевого параметра.
проверить авто по вин
Технология “Глаз Бога” автоматически собирает информацию из открытых баз , формируя структурированные данные .
Клиенты бота получают 5 бесплатных проверок для проверки эффективности.
Платформа постоянно развивается, сохраняя актуальность данных в соответствии с требованиями времени .
На данном сайте вы можете получить доступ к боту “Глаз Бога” , который позволяет собрать всю информацию о любом человеке из публичных данных.
Данный сервис осуществляет поиск по номеру телефона и показывает информацию из государственных реестров .
С его помощью можно узнать контакты через официальный сервис , используя автомобильный номер в качестве поискового запроса .
пробив по паспорту
Алгоритм “Глаз Бога” автоматически собирает информацию из проверенных ресурсов, формируя исчерпывающий результат.
Пользователи бота получают ограниченное тестирование для тестирования возможностей .
Сервис постоянно развивается, сохраняя высокую точность в соответствии с стандартами безопасности .
Где остановиться в Гаграх: комфортный отдых в гостевых домах и отелях
гагра жилье [url=http://www.otdyh-gagry.ru/]http://www.otdyh-gagry.ru/[/url] .
Looking for exclusive 1xBet promo codes? Our platform offers verified bonus codes like 1XRUN200 for new users in 2024. Get up to 32,500 RUB as a welcome bonus.
Use official promo codes during registration to boost your bonuses. Benefit from no-deposit bonuses and exclusive deals tailored for sports betting.
Discover daily updated codes for 1xBet Kazakhstan with fast withdrawals.
All promotional code is checked for accuracy.
Don’t miss exclusive bonuses like 1x_12121 to double your funds.
Valid for first-time deposits only.
https://yarmarkarus.ru/user/profile/9826Stay ahead with top bonuses – apply codes like 1x_12121 at checkout.
Enjoy seamless benefits with easy redemption.
Looking for exclusive 1xBet promo codes? Our platform offers verified promotional offers like 1x_12121 for new users in 2025. Get up to 32,500 RUB as a first deposit reward.
Use official promo codes during registration to boost your bonuses. Enjoy no-deposit bonuses and exclusive deals tailored for sports betting.
Discover daily updated codes for 1xBet Kazakhstan with fast withdrawals.
Every promotional code is tested for validity.
Grab limited-time offers like GIFT25 to increase winnings.
Active for new accounts only.
https://listingbookmarks.com/story19709099/unlocking-1xbet-promo-codes-for-enhanced-betting-in-multiple-countriesStay ahead with top bonuses – enter codes like 1x_12121 at checkout.
Enjoy seamless benefits with easy redemption.
Модульный дом https://kubrdom.ru из морского контейнера для глэмпинга — стильное и компактное решение для туристических баз. Полностью готов к проживанию: утепление, отделка, коммуникации.
Проблемы с iPhone или Mac? Обратитесь к профессионалам.
сайт Кракен тор ссылка Кракен
¿Necesitas promocódigos recientes de 1xBet? En este sitio descubrirás recompensas especiales para apostar .
La clave 1x_12121 garantiza a 6500 RUB para nuevos usuarios.
Además , utiliza 1XRUN200 y obtén hasta 32,500₽ .
https://salmon-taro-pphnlm.mystrikingly.com/blog/unlock-exciting-betting-opportunities-with-1xbet-promo-codes-in-2025
Mantente atento las novedades para ganar más beneficios .
Los promocódigos listados están actualizados para 2025 .
Actúa ahora y potencia tus ganancias con esta plataforma confiable!
В этом ресурсе доступен специализированный бот “Глаз Бога” , который анализирует сведения о любом человеке из публичных баз .
Инструмент позволяет идентифицировать человека по ФИО , раскрывая информацию из социальных сетей .
https://glazboga.net/
Здесь доступен мощный бот “Глаз Бога” , который обрабатывает информацию о любом человеке из публичных баз .
Система позволяет пробить данные по фотографии, показывая данные из онлайн-платформ.
https://glazboga.net/
На данном сайте вы можете получить доступ к боту “Глаз Бога” , который способен получить всю информацию о любом человеке из публичных данных.
Уникальный бот осуществляет проверку ФИО и показывает информацию из онлайн-платформ.
С его помощью можно проверить личность через официальный сервис , используя автомобильный номер в качестве поискового запроса .
проверить машину по номеру
Технология “Глаз Бога” автоматически анализирует информацию из проверенных ресурсов, формируя структурированные данные .
Подписчики бота получают 5 бесплатных проверок для ознакомления с функционалом .
Сервис постоянно развивается, сохраняя скорость обработки в соответствии с требованиями времени .
Full hd film izleme ayrıcalığıyla evde sinema salonu deneyimi
4 k film izle [url=https://filmizlehd.co]https://filmizlehd.co[/url] .
This platform provides detailed information about Audemars Piguet Royal Oak watches, including market values and design features.
Access data on popular references like the 41mm Selfwinding in stainless steel or white gold, with prices averaging $39,939 .
The platform tracks resale values , where limited editions can sell for $140,000+ .
Piguet Royal Oak 15510 or prices
Movement types such as water resistance are clearly outlined .
Get insights on 2025 price fluctuations, including the Royal Oak 15510ST’s retail jump to $39,939 .
This platform features detailed information about Audemars Piguet Royal Oak watches, including retail costs and technical specifications .
Access data on luxury editions like the 41mm Selfwinding in stainless steel or white gold, with prices averaging $39,939 .
This resource tracks resale values , where limited editions can appreciate over time.
Piguet Royal Oak 15510 or price
Movement types such as automatic calibers are clearly outlined .
Check trends on 2025 price fluctuations, including the Royal Oak 15510ST’s investment potential.
Professional concrete driveway contractors in seattle — high-quality installation, durable materials and strict adherence to deadlines. We work under a contract, provide a guarantee, and visit the site. Your reliable choice in Seattle.
Professional power washing in Seattle — effective cleaning of facades, sidewalks, driveways and other surfaces. Modern equipment, affordable prices, travel throughout Seattle. Cleanliness that is visible at first glance.
Professional seattle swimming pool installation — reliable service, quality materials and adherence to deadlines. Individual approach, experienced team, free estimate. Your project — turnkey with a guarantee.
Aksiyon severler için adrenalin dolu full hd film önerileri
full hd film izle türkçe dublaj [url=http://www.filmizlehd.co/]http://www.filmizlehd.co/[/url] .
Need transportation? car shipping near me car transportation company services — from one car to large lots. Delivery to new owners, between cities. Safety, accuracy, licenses and experience over 10 years.
Нужна камера? установка камер видеонаблюдения расценки для дома, офиса и улицы. Широкий выбор моделей: Wi-Fi, с записью, ночным видением и датчиком движения. Гарантия, быстрая доставка, помощь в подборе и установке.
Searching for exclusive 1xBet discount vouchers? Here is your ultimate destination to unlock top-tier offers for betting .
If you’re just starting or an experienced player, the available promotions provides maximum benefits across all bets.
Keep an eye on weekly promotions to maximize your betting experience .
https://rentry.co/bc9pauos
Available vouchers are tested for validity to ensure functionality in 2025 .
Act now of premium bonuses to revolutionize your odds of winning with 1xBet.
Лицензирование и сертификация — обязательное условие ведения бизнеса в России, обеспечивающий защиту от неквалифицированных кадров.
Обязательная сертификация требуется для подтверждения безопасности товаров.
Для 49 видов деятельности необходимо получение лицензий.
https://ok.ru/group/70000034956977/topic/158872196331697
Нарушения правил ведут к штрафам до 1 млн рублей.
Дополнительные лицензии помогает повысить доверие бизнеса.
Своевременное оформление — залог легальной работы компании.
Сертификация и лицензии — обязательное условие ведения бизнеса в России, обеспечивающий защиту от неквалифицированных кадров.
Обязательная сертификация требуется для подтверждения безопасности товаров.
Для торговли, логистики, финансов необходимо специальных разрешений.
https://ok.ru/group/70000034956977/topic/158870220421297
Нарушения правил ведут к штрафам до 1 млн рублей.
Добровольная сертификация помогает повысить доверие бизнеса.
Соблюдение норм — залог легальной работы компании.
how to ship your car long distance towing
Ищете ресурсы коллекционеров? Эта платформа предлагает исчерпывающие материалы для изучения монет !
Здесь доступны редкие экземпляры из разных эпох , а также антикварные находки.
Изучите архив с подробными описаниями и высококачественными фото , чтобы сделать выбор .
монета святой георгий
Если вы начинающий или эксперт, наши обзоры и гайды помогут расширить знания .
Воспользуйтесь шансом приобрести эксклюзивные артефакты с сертификатами.
Присоединяйтесь сообщества ценителей и будьте в курсе аукционов в мире нумизматики.
Хотите найти ресурсы для нумизматов ? Наш сайт предлагает всё необходимое для изучения монет !
Здесь доступны уникальные экземпляры из разных эпох , а также антикварные находки.
Изучите каталог с подробными описаниями и высококачественными фото , чтобы сделать выбор .
инвестиционные монеты купить в Москве
Если вы начинающий или профессиональный коллекционер , наши обзоры и руководства помогут расширить знания .
Не упустите шансом добавить в коллекцию лимитированные артефакты с гарантией подлинности .
Станьте частью сообщества энтузиастов и следите аукционов в мире нумизматики.
Здесь можно получить мессенджер-бот “Глаз Бога”, что найти сведения о человеке из открытых источников.
Бот функционирует по номеру телефона, используя актуальные базы в Рунете. С его помощью осуществляется бесплатный поиск и глубокий сбор по фото.
https://glazboga.net/
Balloons Dubai https://balloons-dubai1.com stunning balloon decorations for birthdays, weddings, baby showers, and corporate events. Custom designs, same-day delivery, premium quality.
охрана стоимость в месяц [url=http://rabochiy.site]http://rabochiy.site[/url] .
Доставка алкоголя для корпоративных мероприятий, вечеринок и встреч
москва ночная доставка алкоголя [url=http://alcocity01.ru/]доставка алкоголя москва 24[/url] .
интересные цветочные горшки [url=http://dizaynerskie-kashpo.ru]http://dizaynerskie-kashpo.ru[/url] .
Access detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including market values ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece showcases a robust design with mechanical precision and water resistance , crafted in titanium.
https://ap15710st.superpodium.com
Check secondary market data , where limited editions reach up to $750,000 , alongside vintage models from the 1970s.
Request real-time updates on availability, specifications, and resale performance , with trend reports for informed decisions.
Explore detailed information about the Audemars Piguet Royal Oak Offshore 15710ST via this platform , including price trends ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece boasts a robust design with selfwinding caliber and rugged aesthetics, crafted in titanium.
Verified AP Royal Oak Offshore Diver 15710 prices
Analyze secondary market data , where limited editions reach up to $750,000 , alongside rare references from the 1970s.
Get real-time updates on availability, specifications, and historical value, with trend reports for informed decisions.
Discover detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including pricing insights ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece showcases a robust design with automatic movement and rugged aesthetics, crafted in stainless steel .
Unworn AP Royal Oak Offshore Diver 15710 watches
Analyze secondary market data , where limited editions command premiums , alongside vintage models from the 1970s.
View real-time updates on availability, specifications, and historical value, with free market analyses for informed decisions.
керамогранит в Москве купить керамогранит на стену
Доставка элитного алкоголя на дом с гарантией качества и оригинальности
доставка алкоголя москва 24 [url=https://www.alcocity01.ru/]доставка алкоголя москва 24[/url] .
Идеальные источники бесперебойного питания для дома, в обзоре.
Рейтинг лучших ИБП, в нашем блоге.
Преимущества использования ИБП, в нашем материале.
Как выбрать ИБП для вашего оборудования, читайте.
Все о ИБП, в статье.
Покупка ИБП: на что обратить внимание, узнайте.
Источники бесперебойного питания: как выбрать лучший, читайте.
Как работает источник бесперебойного питания, читайте.
Советы по использованию ИБП, в нашем блоге.
Тенденции рынка источников бесперебойного питания, в гиде.
Как правильно подключить ИБП, узнайте.
Как выбрать ИБП для разных нужд, читайте.
Как выбрать оптимальный ИБП, здесь.
Сравнение ИБП: какой выбрать?, узнайте.
Как установить источник бесперебойного питания?, читайте.
Обзор популярнейших источников бесперебойного питания, в этой статье.
Устранение неисправностей ИБП, узнайте.
Сравнение моделей источников бесперебойного питания, здесь.
Топ-10 источников бесперебойного питания на рынке, здесь.
УПС [url=https://www.istochniki-bespereboynogo-pitaniya.ru/#УПС]https://www.istochniki-bespereboynogo-pitaniya.ru/[/url] .
Discover detailed information about the Audemars Piguet Royal Oak Offshore 15710ST on this site , including pricing insights ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece boasts a robust design with mechanical precision and water resistance , crafted in rose gold .
Authentic Piguet Royal Oak Offshore 15710 st review
Analyze secondary market data , where limited editions command premiums , alongside pre-owned listings from the 1970s.
View real-time updates on availability, specifications, and historical value, with trend reports for informed decisions.
Explore detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including price trends ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece features a robust design with mechanical precision and water resistance , crafted in stainless steel .
https://ap15710st.superpodium.com
Analyze secondary market data , where limited editions command premiums , alongside pre-owned listings from the 1970s.
Request real-time updates on availability, specifications, and investment returns , with free market analyses for informed decisions.
Профессиональное https://kosmetologicheskoe-oborudovanie-msk.ru для салонов красоты, клиник и частных мастеров. Аппараты для чистки, омоложения, лазерной эпиляции, лифтинга и ухода за кожей.
Discover the iconic Patek Philippe Nautilus, a horological masterpiece that merges athletic sophistication with exquisite craftsmanship .
Introduced nearly 50 years ago, this cult design redefined high-end sports watches, featuring distinctive octagonal bezels and horizontally grooved dials .
From stainless steel models like the 5990/1A-011 with a 55-hour energy retention to opulent gold interpretations such as the 5811/1G-001 with a azure-toned face, the Nautilus suits both avid enthusiasts and casual admirers.
Certified PP Nautilus 5980r wristwatches
The diamond-set 5719 elevate the design with dazzling bezels , adding unparalleled luxury to the iconic silhouette .
According to recent indices like the 5726/1A-014 at ~$106,000, the Nautilus remains a coveted investment in the world of luxury horology .
Whether you seek a vintage piece or modern redesign, the Nautilus embodies Patek Philippe’s legacy of excellence .
Discover the iconic Patek Philippe Nautilus, a horological masterpiece that merges sporty elegance with exquisite craftsmanship .
Introduced nearly 50 years ago, this legendary watch revolutionized high-end sports watches, featuring signature angular cases and horizontally grooved dials .
From stainless steel models like the 5990/1A-011 with a 45-hour power reserve to opulent gold interpretations such as the 5811/1G-001 with a blue gradient dial , the Nautilus suits both avid enthusiasts and everyday wearers .
New Philippe Nautilus 5711 watch reviews
Certain diamond-adorned versions elevate the design with dazzling bezels , adding unmatched glamour to the timeless profile.
With market values like the 5726/1A-014 at ~$106,000, the Nautilus remains a prized asset in the world of premium watchmaking.
For those pursuing a vintage piece or modern redesign, the Nautilus epitomizes Patek Philippe’s legacy of excellence .
Discover detailed information about the Audemars Piguet Royal Oak Offshore 15710ST on this site , including pricing insights ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece features a robust design with automatic movement and durability , crafted in stainless steel .
https://ap15710st.superpodium.com
Check secondary market data , where limited editions command premiums , alongside pre-owned listings from the 1970s.
Request real-time updates on availability, specifications, and historical value, with price comparisons for informed decisions.
консультация юриста по алиментам помощь юриста по телефону бесплатно
ultimate createporn AI generator. Create hentai art, porn comics, and NSFW with the best AI porn maker online. Start generating AI porn now!
Access detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including pricing insights ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece boasts a robust design with automatic movement and water resistance , crafted in stainless steel .
https://ap15710st.superpodium.com
Check secondary market data , where limited editions reach up to $750,000 , alongside rare references from the 1970s.
View real-time updates on availability, specifications, and historical value, with trend reports for informed decisions.
Access detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including market values ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece showcases a robust design with automatic movement and rugged aesthetics, crafted in stainless steel .
Used Audemars Royal Oak 15710st reviews
Compare secondary market data , where limited editions command premiums , alongside rare references from the 1970s.
Request real-time updates on availability, specifications, and historical value, with free market analyses for informed decisions.
Explore detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including pricing insights ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece showcases a robust design with mechanical precision and rugged aesthetics, crafted in titanium.
https://ap15710st.superpodium.com
Analyze secondary market data , where limited editions reach up to $750,000 , alongside rare references from the 1970s.
Get real-time updates on availability, specifications, and historical value, with price comparisons for informed decisions.
Explore detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including price trends ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece boasts a robust design with selfwinding caliber and water resistance , crafted in titanium.
Unworn AP Royal Oak Offshore 15710 price
Analyze secondary market data , where limited editions command premiums , alongside vintage models from the 1970s.
Request real-time updates on availability, specifications, and investment returns , with trend reports for informed decisions.
Ежедневные публикации о самых важных и интересных событиях в мире и России. Только проверенная информация с различных отраслей https://aeternamemoria.ru/
Все самое интересное про компьютеры, мобильные телефоны, программное обеспечение, софт и многое иное. Также актуальные обзоры всяких технических новинок ежедневно на нашем портале https://chto-s-kompom.ru/
Обязательная сертификация в России необходима для подтверждения качества потребителей, так как блокирует попадание опасной или некачественной продукции на рынок.
Система сертификации основаны на нормативных актах , таких как ФЗ № 184-ФЗ, и охватывают как отечественные товары, так и импортные аналоги .
отказное письмо по сертификации Документальное подтверждение гарантирует, что продукция соответствует ГОСТам безопасности и не нанесет вреда людям и окружающей среде.
Кроме того сертификация повышает конкурентоспособность товаров на глобальной арене и открывает доступ к экспорту.
Развитие системы сертификации отражает современным стандартам, что укрепляет экономику в условиях законодательных изменений .
КредитоФФ http://creditoroff.ru удобный онлайн-сервис для подбора и оформления займов в надёжных микрофинансовых организациях России. Здесь вы найдёте лучшие предложения от МФО
Ежедневные актуальные новости про самые важные события в мире и России. Также публикация аналитических статей на тему общества, экономики, туризма и автопрома https://telemax-net.ru/
Блог о здоровье, красоте, полезные советы на каждый день в быту и на даче https://lmoroshkina.ru/
Проститутки Тюмени
Журнал о психологии и отношениях, чувствах и эмоциях, здоровье и отдыхе. О том, что с нами происходит в жизни. Для тех, кто хочет понять себя и других https://inormal.ru/
primer-10
Проститутки Тюмени
Проститутки Тюмень
Explore detailed information about the Audemars Piguet Royal Oak Offshore 15710ST via this platform , including pricing insights ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece boasts a robust design with automatic movement and durability , crafted in rose gold .
Original Piguet Royal Oak Offshore Diver 15710 price
Check secondary market data , where limited editions fluctuate with demand, alongside rare references from the 1970s.
Get real-time updates on availability, specifications, and investment returns , with free market analyses for informed decisions.
Discover detailed information about the Audemars Piguet Royal Oak Offshore 15710ST via this platform , including market values ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece features a robust design with automatic movement and rugged aesthetics, crafted in stainless steel .
https://ap15710st.superpodium.com
Compare secondary market data , where limited editions command premiums , alongside pre-owned listings from the 1970s.
View real-time updates on availability, specifications, and investment returns , with price comparisons for informed decisions.
Лучшие юристы Екатеринбурга yuristy-ekaterinburga
Сделать временную регистрацию в Москве можно через официальные каналы с внесением данных в государственный реестр https://registraceja-v-moskverus-1669.ru/
Проститутки Тюмень
Шлюхи Тюмени
Access detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including pricing insights ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece features a robust design with selfwinding caliber and durability , crafted in rose gold .
New Audemars Piguet Royal Oak Offshore Diver 15710st price
Analyze secondary market data , where limited editions fluctuate with demand, alongside pre-owned listings from the 1970s.
Get real-time updates on availability, specifications, and investment returns , with trend reports for informed decisions.
интересные кашпо [url=www.dizaynerskie-kashpo.ru]интересные кашпо[/url] .
Discover detailed information about the Audemars Piguet Royal Oak Offshore 15710ST via this platform , including price trends ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece showcases a robust design with selfwinding caliber and rugged aesthetics, crafted in rose gold .
Pre-Owned Piguet Royal Oak Offshore Diver 15710 st review
Compare secondary market data , where limited editions fluctuate with demand, alongside rare references from the 1970s.
Get real-time updates on availability, specifications, and investment returns , with trend reports for informed decisions.
Наш ресурс размещает свежие новостные материалы разных сфер.
Здесь доступны факты и мнения, бизнесе и многом другом.
Информация обновляется ежедневно, что позволяет следить за происходящим.
Минималистичный дизайн помогает быстро ориентироваться.
https://ryazansport.ru
Каждое сообщение проходят проверку.
Редакция придерживается честной подачи.
Оставайтесь с нами, чтобы быть в курсе самых главных событий.
Данный портал публикует свежие информационные статьи на любые темы.
Здесь вы легко найдёте новости о политике, науке и других областях.
Контент пополняется ежедневно, что позволяет всегда быть в курсе.
Минималистичный дизайн делает использование комфортным.
https://balenciager.ru
Каждая статья написаны грамотно.
Мы стремимся к объективности.
Присоединяйтесь к читателям, чтобы быть всегда информированными.
займы онлайн без процентов займы онлайн без проверок
Explore detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including market values ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece showcases a robust design with mechanical precision and rugged aesthetics, crafted in titanium.
https://ap15710st.superpodium.com
Compare secondary market data , where limited editions fluctuate with demand, alongside rare references from the 1970s.
Get real-time updates on availability, specifications, and historical value, with free market analyses for informed decisions.
Женский блог https://zhinka.in.ua Жінка это самое интересное о красоте, здоровье, отношениях. Много полезной информации для женщин.
Discover detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including market values ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece features a robust design with mechanical precision and water resistance , crafted in stainless steel .
https://ap15710st.superpodium.com
Analyze secondary market data , where limited editions reach up to $750,000 , alongside rare references from the 1970s.
Get real-time updates on availability, specifications, and investment returns , with free market analyses for informed decisions.
Городской портал Черкассы https://u-misti.cherkasy.ua новости, обзоры, события Черкасс и области
Строительный портал https://proektsam.kyiv.ua свежие новости отрасли, профессиональные советы, обзоры материалов и технологий, база подрядчиков и поставщиков. Всё о ремонте, строительстве и дизайне в одном месте.
Discover detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including pricing insights ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece boasts a robust design with mechanical precision and water resistance , crafted in titanium.
Authentic Audemars Royal Oak Offshore Diver 15710st review
Compare secondary market data , where limited editions command premiums , alongside vintage models from the 1970s.
Request real-time updates on availability, specifications, and historical value, with price comparisons for informed decisions.
Access detailed information about the Audemars Piguet Royal Oak Offshore 15710ST here , including market values ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece boasts a robust design with mechanical precision and water resistance , crafted in titanium.
https://ap15710st.superpodium.com
Compare secondary market data , where limited editions command premiums , alongside rare references from the 1970s.
Request real-time updates on availability, specifications, and investment returns , with trend reports for informed decisions.
Get your AC ducts cleaned in Dubai to ensure better cooling efficiency and energy savings https://ac-cleaning-dubai.ae/
Портал города Черновцы https://u-misti.chernivtsi.ua последние новости, события, обзоры
вызвать нарколога на дом вызов нарколога в нижнем новгороде
эффективное кодирование от алкоголизма кодирование от алкоголизма в нижнем
лечение алкоголизма нижний новгород лечение алкоголизма нижний новгород
выведение из запоя дома вывод из запоя в нижнем новгороде круглосуточно стационар
Новинний сайт Житомира https://faine-misto.zt.ua новости Житомира сегодня
Праздничная продукция https://prazdnik-x.ru для любого повода: шары, гирлянды, декор, упаковка, сувениры. Всё для дня рождения, свадьбы, выпускного и корпоративов.
оценка спецтехники Москва оценка стоимости лицензии
лечение наркомании реабилитация лечение наркомании клиника
Всё для строительства https://d20.com.ua и ремонта: инструкции, обзоры, экспертизы, калькуляторы. Профессиональные советы, новинки рынка, база строительных компаний.
Discover detailed information about the Audemars Piguet Royal Oak Offshore 15710ST on this site , including market values ranging from $34,566 to $36,200 for stainless steel models.
The 42mm timepiece showcases a robust design with mechanical precision and durability , crafted in rose gold .
https://ap15710st.superpodium.com
Check secondary market data , where limited editions reach up to $750,000 , alongside pre-owned listings from the 1970s.
Request real-time updates on availability, specifications, and investment returns , with price comparisons for informed decisions.
стильные горшки для комнатных растений [url=www.dizaynerskie-kashpo1.ru/]стильные горшки для комнатных растений[/url] .
Professional AC duct cleaning in Dubai improves air quality and reduces allergens in your home https://ac-cleaning-dubai.ae/
Строительный журнал https://garant-jitlo.com.ua всё о технологиях, материалах, архитектуре, ремонте и дизайне. Интервью с экспертами, кейсы, тренды рынка.
Онлайн-журнал https://inox.com.ua о строительстве: обзоры новинок, аналитика, советы, интервью с архитекторами и застройщиками.
Современный строительный https://interiordesign.kyiv.ua журнал: идеи, решения, технологии, тенденции. Всё о ремонте, стройке, дизайне и инженерных системах.
Информационный журнал https://newhouse.kyiv.ua для строителей: строительные технологии, материалы, тенденции, правовые аспекты.
Защитите свои права! Воспользуйтесь бесплатной юридической консультацией. Опытные юристы помогут разобраться в сложных правовых вопросах по телефону. Первый шаг к решению вашей проблемы – бесплатная юридическая консультация по телефону круглосуточно
кашпо оригинальное купить [url=http://www.dizaynerskie-kashpo.ru]http://www.dizaynerskie-kashpo.ru[/url] .
Строительный журнал https://poradnik.com.ua для профессионалов и частных застройщиков: новости отрасли, обзоры технологий, интервью с экспертами, полезные советы.
Всё о строительстве https://stroyportal.kyiv.ua в одном месте: технологии, материалы, пошаговые инструкции, лайфхаки, обзоры, советы экспертов.
Журнал о строительстве https://sovetik.in.ua качественный контент для тех, кто строит, проектирует или ремонтирует. Новые технологии, анализ рынка, обзоры материалов и оборудование — всё в одном месте.
Полезный сайт https://vasha-opora.com.ua для тех, кто строит: от фундамента до крыши. Советы, инструкции, сравнение материалов, идеи для ремонта и дизайна.
https://trialfiles.com/grindr-alternatives/
Новости Полтава https://u-misti.poltava.ua городской портал, последние события Полтавы и области
Кулинарный портал https://vagon-restoran.kiev.ua с тысячами проверенных рецептов на каждый день и для особых случаев. Пошаговые инструкции, фото, видео, советы шефов.
Мужской журнал https://hand-spin.com.ua о стиле, спорте, отношениях, здоровье, технике и бизнесе. Актуальные статьи, советы экспертов, обзоры и мужской взгляд на важные темы.
Журнал для мужчин https://swiss-watches.com.ua которые ценят успех, свободу и стиль. Практичные советы, мотивация, интервью, спорт, отношения, технологии.
Читайте мужской https://zlochinec.kyiv.ua журнал онлайн: тренды, обзоры, советы по саморазвитию, фитнесу, моде и отношениям. Всё о том, как быть уверенным, успешным и сильным — каждый день.
https://blstone.ru/
ИнфоКиев https://infosite.kyiv.ua события, новости обзоры в Киеве и области.
Откройте для себя свежие идеи о стиле, здоровье и красоте на сайте jornalwomen.ru. Полезные советы, актуальные новости, вдохновение и рекомендации для современных женщин – заходите ежедневно за новым контентом!
Установка оборудования для наблюдения обеспечит защиту помещения круглосуточно.
Современные технологии гарантируют четкую картинку даже при слабом освещении.
Наша компания предоставляет множество решений систем, адаптированных для бизнеса и частных объектов.
videonablyudeniemoskva.ru
Профессиональная установка и консультации специалистов превращают решение максимально удобным для всех заказчиков.
Обратитесь сегодня, для получения оптимальное предложение в сфере безопасности.
Все новинки https://helikon.com.ua технологий в одном месте: гаджеты, AI, робототехника, электромобили, мобильные устройства, инновации в науке и IT.
Портал о ремонте https://as-el.com.ua и строительстве: от черновых работ до отделки. Статьи, обзоры, идеи, лайфхаки.
Ремонт без стресса https://odessajs.org.ua вместе с нами! Полезные статьи, лайфхаки, дизайн-проекты, калькуляторы и обзоры.
Сайт о строительстве https://selma.com.ua практические советы, современные технологии, пошаговые инструкции, выбор материалов и обзоры техники.
стильные горшки для комнатных цветов [url=www.dizaynerskie-kashpo1.ru]стильные горшки для комнатных цветов[/url] .
Получение разрешения на работу, важный процесс, рекомендуется ознакомиться.
Разрешение на работу за границей: основные моменты, пошаговые советы.
Все о Разрешении на работу, особенности процесса.
Подробности о продлении разрешения на работу, информация.
Как студенту получить разрешение на работу, условия для трудоустройства.
Ошибки при получении разрешения на работу, полезная информация.
Сравнение разрешений на работу в разных странах, изучите.
Перечень документов для разрешения на работу, не забудьте подготовить документы.
Как избежать отказа в разрешении на работу, важные советы.
Что нужно знать о своих правах при получении разрешения на работу, полный обзор.
Как долго ждать разрешение на работу, все о сроках.
Разрешение на работу для фрилансеров, основные моменты.
Как проверить статус разрешения на работу, советы по проверке.
Разрешение на работу для родителей-одиночек, рекомендации.
Советы по интервью для разрешения на работу, как пройти успешно.
Разрешение на работу и налоги, разъяснения.
Разрешение на работу для людей с инвалидностью, лучшие практики.
Услуги по оформлению разрешения на работу: что нужно знать, полезные советы.
Переезд и работа: разрешение на работу, планирование.
Как получить разрешение на работу в условиях кризиса, практические рекомендации.
документы на разрешение на работу [url=http://www.oformleniernr.ru/#документы-на-разрешение-на-работу]http://www.oformleniernr.ru/[/url] .
Городской портал Винницы https://u-misti.vinnica.ua новости, события и обзоры Винницы и области
Портал Львів https://u-misti.lviv.ua останні новини Львова и области.
Свежие новости https://ktm.org.ua Украины и мира: политика, экономика, происшествия, культура, спорт. Оперативно, объективно, без фейков.
Сайт о строительстве https://solution-ltd.com.ua и дизайне: как построить, отремонтировать и оформить дом со вкусом.
Авто портал https://real-voice.info для всех, кто за рулём: свежие автоновости, обзоры моделей, тест-драйвы, советы по выбору, страхованию и ремонту.
Новини Львів https://faine-misto.lviv.ua последние новости и события – Файне Львов
Строительный портал https://apis-togo.org полезные статьи, обзоры материалов, инструкции по ремонту, дизайн-проекты и советы мастеров.
Комплексный строительный https://ko-online.com.ua портал: свежие статьи, советы, проекты, интерьер, ремонт, законодательство.
Всё о строительстве https://furbero.com в одном месте: новости отрасли, технологии, пошаговые руководства, интерьерные решения и ландшафтный дизайн.
Онлайн-портал https://leif.com.ua для женщин: мода, психология, рецепты, карьера, дети и любовь. Читай, вдохновляйся, общайся, развивайся!
Современный женский https://prowoman.kyiv.ua портал: полезные статьи, лайфхаки, вдохновляющие истории, мода, здоровье, дети и дом.
Портал о маркетинге https://reklamspilka.org.ua рекламе и PR: свежие идеи, рабочие инструменты, успешные кейсы, интервью с экспертами.
дизайнерские цветочные горшки [url=http://dizaynerskie-kashpo1.ru]дизайнерские цветочные горшки[/url] .
События Днепр https://u-misti.dp.ua последние новости Днепра и области, обзоры и самое интересное
Семейный портал https://stepandstep.com.ua статьи для родителей, игры и развивающие материалы для детей, советы психологов, лайфхаки.
Клуб родителей https://entertainment.com.ua пространство поддержки, общения и обмена опытом.
Всё о спорте https://beachsoccer.com.ua в одном месте: профессиональный и любительский спорт, фитнес, здоровье, техника упражнений и спортивное питание.
Туристический портал https://aliana.com.ua с лучшими маршрутами, подборками стран, бюджетными решениями, гидами и советами.
Коллекция Nautilus, созданная Жеральдом Гентой, сочетает спортивный дух и прекрасное ремесленничество. Модель Nautilus 5711 с автоматическим калибром 324 SC имеет энергонезависимость до 2 дней и корпус из белого золота.
Восьмиугольный безель с округлыми гранями и синий солнечный циферблат подчеркивают уникальность модели. Браслет с интегрированными звеньями обеспечивает удобную посадку даже при активном образе жизни.
Часы оснащены индикацией числа в позиции 3 часа и сапфировым стеклом.
Для версий с усложнениями доступны хронограф, вечный календарь и функция Travel Time.
Купить часы Патек Филип Nautilus на сайте
Например, модель 5712/1R-001 из розового золота с механизмом на 265 деталей и запасом хода на двое суток.
Nautilus остается предметом коллекционирования, объединяя современные технологии и традиции швейцарского часового дела.
Крайне советую https://monkeyslots.com/forums/topic/read-this-article/#post-347750
Рекомендую https://thephotograms.com/a-moms-reflection/
Новости Украины https://useti.org.ua в реальном времени. Всё важное — от официальных заявлений до мнений экспертов.
Информационный портал https://comart.com.ua о строительстве и ремонте: полезные советы, технологии, идеи, лайфхаки, расчёты и выбор материалов.
Архитектурный портал https://skol.if.ua современные проекты, урбанистика, дизайн, планировка, интервью с архитекторами и тренды отрасли.
Всё о строительстве https://ukrainianpages.com.ua просто и по делу. Портал с актуальными статьями, схемами, проектами, рекомендациями специалистов.
Новости Украины https://hansaray.org.ua 24/7: всё о жизни страны — от региональных происшествий до решений на уровне власти.
Всё об автомобилях https://autoclub.kyiv.ua в одном месте. Обзоры, новости, инструкции по уходу, автоистории и реальные тесты.
Новостной портал Одесса https://u-misti.odesa.ua последние события города и области. Обзоры и много интресного о жизни в Одессе.
Строительный журнал https://dsmu.com.ua идеи, технологии, материалы, дизайн, проекты, советы и обзоры. Всё о строительстве, ремонте и интерьере
Портал о строительстве https://tozak.org.ua от идеи до готового дома. Проекты, сметы, выбор материалов, ошибки и их решения.
Прямо здесь вы найдете Telegram-бот “Глаз Бога”, позволяющий проверить всю информацию по человеку по публичным данным.
Бот активно ищет по номеру телефона, обрабатывая публичные материалы в сети. Через бота можно получить 5 бесплатных проверок и детальный анализ по имени.
Инструмент актуален на 2025 год и поддерживает фото и видео. Бот сможет узнать данные в соцсетях и отобразит информацию в режиме реального времени.
найти через глаз бога
Данный инструмент — выбор в анализе персон удаленно.
На данном сайте вы найдете сервис “Глаз Бога”, позволяющий собрать всю информацию по человеку из открытых источников.
Бот активно ищет по номеру телефона, обрабатывая доступные данные в сети. С его помощью осуществляется бесплатный поиск и полный отчет по запросу.
Платформа актуален на 2025 год и охватывает аудио-материалы. Сервис гарантирует узнать данные по госреестрам и предоставит информацию за секунды.
глаз бога телеграмм сайт
Это бот — выбор для проверки людей онлайн.
Городской портал Одессы https://faine-misto.od.ua последние новости и происшествия в городе и области
Информационный портал https://dailynews.kyiv.ua актуальные новости, аналитика, интервью и спецтемы.
Новостной портал https://news24.in.ua нового поколения: честная журналистика, удобный формат, быстрый доступ к ключевым событиям.
Портал для женщин https://a-k-b.com.ua любого возраста: стиль, красота, дом, психология, материнство и карьера.
Онлайн-новости https://arguments.kyiv.ua без лишнего: коротко, по делу, достоверно. Политика, бизнес, происшествия, спорт, лайфстайл.
Мировые новости https://ua-novosti.info онлайн: политика, экономика, конфликты, наука, технологии и культура.
Только главное https://ua-vestnik.com о событиях в Украине: свежие сводки, аналитика, мнения, происшествия и реформы.
Женский портал https://woman24.kyiv.ua обо всём, что волнует: красота, мода, отношения, здоровье, дети, карьера и вдохновение.
кейс защитный альфа экстрим plastcase.ru
The best Server in Europe (best European data centers) managed and unmanaged, GDPR compliant, super fast NVMe SSDs, reliable 1Gbps network, choice of OS and finally affordable prices. Hurry up and get a free dedicated server upgrade until the end of this month!
Офисная мебель https://officepro54.ru в Новосибирске купить недорого от производителя
Займ сайт кредит займ
Klavier noten noten musik klavier
Очень советую https://itci.edu.vn/truong-hoc-tai-my/stanford-university/
Ищете незабываемый тур на Камчатку? Организуем увлекательные путешествия по самым живописным уголкам полуострова: вулканы, горячие источники, медведи, океан и дикая природа! Профессиональные гиды, продуманные маршруты и комфорт на всём протяжении поездки. Индивидуальные и групповые туры, трансфер и полное сопровождение: тур на камчатку с детьми
Хмельницький новини https://u-misti.khmelnytskyi.ua огляди, новини, сайт Хмельницького
заказать отчет по учебной практике https://otchetbuhgalter.ru
купить готовый реферат стоимость реферата
диплом заказать купить готовый диплом
Медпортал https://medportal.co.ua украинский блог о медициние и здоровье. Новости, статьи, медицинские учреждения
À la recherche de divertissements interactifs? Notre plateforme regroupe une sélection variée pour tous les goûts .
Des puzzles aux défis multijoueurs , plongez des mécaniques innovantes directement depuis votre navigateur.
Testez les classiques comme le Sudoku ou des simulations immersives en équipe.
Les amateurs de sport, des courses automobiles en mode battle royale vous attendent.
casino en ligne paypal
Accédez gratuitement d’expériences premium et rejoignez des joueurs passionnés.
Que vous préfériez l’action, cette bibliothèque virtuelle deviendra une référence incontournable.
Файне Винница https://faine-misto.vinnica.ua новости и события Винницы сегодня. Городской портал, обзоры.
займы онлайн на карту https://zajmy-onlajn.ru
Крайне рекомендую http://voicesofyouthresearch.com/from-the-margins-logo/
Автогид https://avtogid.in.ua автомобильный украинский портал с новостями, обзорами, советами для автовладельцев
решить контрольную работу https://kontrolnyestatistika.ru/
https://www.rlocman.ru/press-rel/rel.html?di=4773
Портал Киева https://u-misti.kyiv.ua новости и события в Киеве сегодня.
Коллекция Nautilus, созданная мастером дизайна Жеральдом Гентой, сочетает элегантность и прекрасное ремесленничество. Модель Nautilus 5711 с автоматическим калибром 324 SC имеет 45-часовой запас хода и корпус из белого золота.
Восьмиугольный безель с округлыми гранями и циферблат с градиентом от синего к черному подчеркивают уникальность модели. Браслет с H-образными элементами обеспечивает комфорт даже при активном образе жизни.
Часы оснащены функцией даты в позиции 3 часа и сапфировым стеклом.
Для сложных модификаций доступны хронограф, лунофаза и индикация второго часового пояса.
https://patek-philippe-nautilus.ru/
Например, модель 5712/1R-001 из красного золота 18K с механизмом на 265 деталей и запасом хода на двое суток.
Nautilus остается символом статуса, объединяя инновации и традиции швейцарского часового дела.
Get your AC ducts cleaned in Dubai to ensure better cooling efficiency and energy savings: #dubai
Коллекция Nautilus, созданная мастером дизайна Жеральдом Гентой, сочетает элегантность и прекрасное ремесленничество. Модель Nautilus 5711 с самозаводящимся механизмом имеет энергонезависимость до 2 дней и корпус из белого золота.
Восьмиугольный безель с округлыми гранями и циферблат с градиентом от синего к черному подчеркивают неповторимость модели. Браслет с интегрированными звеньями обеспечивает удобную посадку даже при повседневном использовании.
Часы оснащены функцией даты в позиции 3 часа и антибликовым покрытием.
Для версий с усложнениями доступны секундомер, вечный календарь и функция Travel Time.
patek-philippe-nautilus.ru
Например, модель 5712/1R-001 из красного золота 18K с калибром повышенной сложности и запасом хода до 48 часов.
Nautilus остается символом статуса, объединяя инновации и классические принципы.
контрольная по менеджменту купить контрольную работу химия
написание дипломной работы диплом срочно заказать
отчет по практике сколько стоит отчет о практике купить
займ под птс онлайн zajmy onlajn
link will be here soon [url=https://care-people-help.org]link will be here soon[/url] .
Услуги клининга в Москве приобретают все большее значение. С учетом быстрой жизни в столице, многие москвичи стремятся облегчить свои бытовые обязанности.
Клиниговые фирмы предлагают целый ряд услуг в области уборки. Профессиональный клининг включает как стандартную уборку, так и глубокую очистку в зависимости от потребностей клиентов.
При выборе клининговой компании важно обратить внимание на опыт работы и отзывы клиентов. Профессиональный подход и соблюдение чистоты и порядка важно для обеспечения высокого качества услуг.
В заключение, клининг в Москве – это удобное решение для занятых людей. Каждый может выбрать подходящую компанию, чтобы обеспечить себе чистоту и порядок в доме.
клининговая компания москва [url=http://www.uborkaklining1.ru]http://www.uborkaklining1.ru[/url] .
Предлагаю https://alfasafe.ru/blog/o-goste-i-kontrafakte/
Сайт Житомир https://u-misti.zhitomir.ua новости и происшествия в Житомире и области
Официальный сайт сервисного центра — проверено!
Сервисный центр рядом — это удобно и быстро.
Rent-Auto.md offers car rental in Chisnau and other major cities of Moldova on the best terms. Whether you are planning a business trip, a family vacation or a business trip, we have the perfect solutions for your travel around the city and beyond.
Магазин климатической техники https://brand-climat.ru предлагает кондиционеры, обогреватели, увлажнители и вентсистемы от ведущих производителей, профессиональную консультацию, официальную гарантию и доставку по всей России.
Комплексный клининг офисов в любое удобное для вас время
клининг в москве [url=https://www.kliningovaya-kompaniya10.ru/]https://www.kliningovaya-kompaniya10.ru/[/url] .
Украинский бизнес https://in-ukraine.biz.ua информацинный портал о бизнесе, финансах, налогах, своем деле в Украине
Get your hands on an exclusive bonus when you register today! – https://krakenpartners.net/ru/track/1174
Репетитор по физике https://repetitor-po-fizike-spb.ru СПб: школьникам и студентам, с нуля и для олимпиад. Четкие объяснения, практика, реальные результаты.
Лучшие онлайн-курсы https://topkursi.ru по востребованным направлениям: от маркетинга до программирования. Учитесь в удобное время, получайте сертификаты и прокачивайте навыки с нуля.
Школа Саморазвития https://bznaniy.ru онлайн-база знаний для тех, кто хочет понять себя, улучшить мышление, прокачать навыки и выйти на новый уровень жизни.
Технология строительства каркасных домов под ключ: от проекта до сдачи
каркасные дома под ключ в спб цены [url=https://www.spb-karkasnye-doma-pod-kluch.ru]https://www.spb-karkasnye-doma-pod-kluch.ru[/url] .
Каркасный дом с гаражом и хозблоком в одном проекте
каркасный дом в спб [url=http://www.karkasnie-doma-pod-kluch06.ru/]http://www.karkasnie-doma-pod-kluch06.ru/[/url] .
Закажите печать на футболках с доставкой по всей России
принт на футболки [url=https://www.pechat-na-futbolkah777.ru/]https://www.pechat-na-futbolkah777.ru/[/url] .
Посетите наш сайт и узнайте о [url=https://uborka-chistota.ru/]стоимости клининговых услуг[/url]!
Клининговые услуги в Санкт-Петербурге востребованы как никогда. С каждым годом растет число организаций, предлагающих услуги по клинингу и уборке помещений.
Пользователи услуг клининга отмечают высокое качество и удобство. Команды клининговых компаний зачастую предлагают персонализированный подход к каждому клиенту, учитывая его потребности.
Клининговые компании предлагают различные варианты услуг, от регулярной уборки до разовых). Некоторые клининговые фирмы предоставляют дополнительные услуги, например, уборку после ремонта или мероприятий.
Цены на клининговые услуги формируются исходя из объема работ и используемых материалов. Заказчики могут подобрать различные варианты услуг, чтобы найти оптимальное решение.
Нужно найти информацию о человеке ? Этот бот предоставит полный профиль мгновенно.
Используйте уникальные алгоритмы для поиска цифровых следов в открытых источниках.
Выясните место работы или активность через систему мониторинга с гарантией точности .
глаз бога бот ссылка
Система функционирует в рамках закона , используя только общедоступную информацию.
Получите расширенный отчет с геолокационными метками и графиками активности .
Попробуйте надежному помощнику для исследований — точность гарантирована!
Хотите собрать данные о пользователе? Наш сервис предоставит полный профиль мгновенно.
Используйте уникальные алгоритмы для поиска цифровых следов в открытых источниках.
Выясните контактные данные или интересы через систему мониторинга с гарантией точности .
глаз бога по номеру телефона
Бот работает в рамках закона , обрабатывая общедоступную информацию.
Закажите расширенный отчет с геолокационными метками и списком связей.
Доверьтесь надежному помощнику для исследований — точность гарантирована!
Нужно найти информацию о пользователе? Наш сервис поможет детальный отчет мгновенно.
Воспользуйтесь продвинутые инструменты для поиска публичных записей в открытых источниках.
Узнайте контактные данные или активность через автоматизированный скан с гарантией точности .
глаз бога телеграмм
Система функционирует в рамках закона , используя только общедоступную информацию.
Получите расширенный отчет с историей аккаунтов и графиками активности .
Попробуйте надежному помощнику для исследований — точность гарантирована!
Хотите найти данные о пользователе? Этот бот поможет полный профиль в режиме реального времени .
Воспользуйтесь уникальные алгоритмы для поиска цифровых следов в открытых источниках.
Узнайте контактные данные или интересы через систему мониторинга с гарантией точности .
глаз бога бот
Система функционирует в рамках закона , обрабатывая открытые данные .
Получите расширенный отчет с историей аккаунтов и списком связей.
Попробуйте надежному помощнику для исследований — точность гарантирована!
Перевод документов https://medicaltranslate.ru на немецкий язык для лечения за границей и с немецкого после лечения: высокая скорость, безупречность, 24/7
Онлайн-тренинги https://communication-school.ru и курсы для личного роста, карьеры и новых навыков. Учитесь в удобное время из любой точки мира.
1С без сложностей https://1s-legko.ru объясняем простыми словами. Как работать в программах 1С, решать типовые задачи, настраивать учёт и избегать ошибок.
анонимная наркологическая клиника центр наркологии
новый пансионат для пожилых дом пансионат для пожилых
Мы строим деревянные дома под ключ с учётом климата и особенностей участка
строительство деревянных домов под ключ проекты и цены [url=https://derevyannye-doma-pod-klyuch-msk0.ru]https://derevyannye-doma-pod-klyuch-msk0.ru[/url] .
Effortless target for you on this web-site https://easygrawvf52.com/
This is really interesting, You’re a very skilled blogger. I’ve joined your rss feed and look forward to in the hunt for extra of your great post. Also, I have shared your web site in my social networks
tadalafil 5 mg online
Na stronie [url=https://bitqt-official.com/]bitqt official[/url] znajdziesz pełen dostęp do najważniejszych funkcji dla inwestorów kryptowalutowych. Prosty proces rozpoczęcia pracy.
Bitqt to zaawansowany system tradingowy, pozwalająca inwestorom na trading na rynkach finansowych. Dzięki zaawansowanym algorytmom, Bitqt analizuje rynki w czasie rzeczywistym, co umożliwia użytkownikom podejmowanie lepszych decyzji inwestycyjnych.
Platforma oferuje wiele opcji, które ułatwiają trading. Inwestorzy mogą korzystać z automatycznego handlu, co pozwala na maksymalizację zysków. System jest intuicyjny i przyjazny dla użytkownika, co sprawia, że nawet początkujący mogą z niego korzystać.
Bezpieczeństwo użytkowników jest priorytetem dla Bitqt. Zastosowane w platformie technologie szyfrowania dają użytkownikom pewność, że ich dane są bezpieczne. Dlatego Bitqt jest wybierane przez wielu inwestorów jako rzetelna platforma.
Podsumowując, Bitqt to świetne rozwiązanie dla osób zainteresowanych inwestowaniem w rynki finansowe. Dzięki innowacyjnym funkcjom, bezpieczeństwu oraz intuicyjnej obsłudze, każdy może rozpocząć swoją inwestycyjną przygodę. Zacznij inwestować w przyszłość z Bitqt.
Честная [url=https://genuborkachistota.ru/]клининг стоимость[/url] позволяет экономить, не жертвуя качеством. Работы выполняются по стандартам и без задержек.
Клининг в Москве стал популярной услугой в последние годы. Все больше людей в Москве выбирают услуги профессионального клининга для уборки своих помещений.
Стоимость клининга может значительно отличаться в зависимости от предлагаемых услуг. Уборка квартиры, как правило, обойдется от 1500 до 5000 рублей в зависимости от площади.
Кроме того, существуют дополнительные услуги, такие как мойка окон или химчистка. Добавление таких услуг может существенно повысить итоговую цену клининга.
Перед тем как выбрать клининговую компанию, стоит провести небольшой анализ рынка. Обращайте внимание на отзывы и рейтинг выбранной клининговой компании.
Календарь стрижек [url=www.inforigin.ru]www.inforigin.ru[/url] .
Ответственные [url=https://uborka12.ru/]клининг компании СПб[/url] знают, как важно качество и сроки. Мы не срываем договорённостей и работаем официально.
Клининг в Санкт-Петербурге становится всё более популярным. Многие компании предлагают широкий спектр услуг. Уборка квартир, офисов и общественных мест – это основные направления клининговых услуг.
Услуги клининговых компаний востребованы в основном из-за экономии времени. Это позволяет им уделять время другим аспектам жизни. Клининговые услуги также становятся идеальным решением для занятых людей.
Клиенты выбирают клининг благодаря высокому профессионализму работников. Работники клининговых компаний обучены использованию нового оборудования и качественных моющих средств. Эффективное использование техники дает возможность достигать быстрого и качественного результата.
Существуют разные пакеты услуг, которые подойдут под любые нужды. Некоторые компании предлагают разовые уборки, другие – долговременное сотрудничество. Это позволяет выбрать наиболее подходящее предложение каждому клиенту.
Календарь стрижек [url=https://istoriamashin.ru/]istoriamashin.ru[/url] .
Южнокорейский сериал о смертельных играх на выживание ради огромного денежного приза. Сотни отчаявшихся людей участвуют в детских играх, где проигрыш означает смерть. Сериал исследует темы социального неравенства, морального выбора и человеческой природы в экстремальных условиях: игра в кальмара сериал 3 сезон
Cross Stitch Pattern in PDF format https://cross-stitch-patterns-free-download.store/ a perfect choice for embroidery lovers! Unique designer chart available for instant download right after purchase.
Погода [url=https://www.topoland.ru]https://www.topoland.ru[/url] .
Надёжная фурнитура https://furnitura-dla-okon.ru для пластиковых окон: всё для ремонта и комплектации. От ручек до многозапорных механизмов.
Фурнитура для ПВХ-окон http://kupit-furnituru-dla-okon.ru оптом и в розницу: европейские бренды, доступные цены, доставка по РФ.
юрист по интернету юридическая консультация бесплатно онлайн круглосуточно без телефона
Hello guys!
I came across a 120 valuable tool that I think you should take a look at.
This platform is packed with a lot of useful information that you might find interesting.
It has everything you could possibly need, so be sure to give it a visit!
[url=https://www.arcyart.com/blog/2023/01/06/4-day-work-week-pros-and-cons/]https://www.arcyart.com/blog/2023/01/06/4-day-work-week-pros-and-cons/[/url]
3 – Acesse a página de vídeos privados do GetFbStuff e cole o código copiado.
типография спб дешево типография печать
типографии спб недорого типография официальный сайт
металлические пины значки производство металлических значков
Ищете незабываемый тур на Камчатку? Организуем увлекательные путешествия по самым живописным уголкам полуострова: вулканы, горячие источники, медведи, океан и дикая природа! Профессиональные гиды, продуманные маршруты и комфорт на всём протяжении поездки. Индивидуальные и групповые туры, трансфер и полное сопровождение: камчатка туры на 2025
גופה רך, עם קפלים קלים בבטן, וזה הופך אותה לאמיתית עוד יותר. אני מושך אותה קרוב יותר, באופן כללי, הם לקחו למבחן. אחרי 2 שנים, כבר מונה לראש המחלקה, ובקרוב כבר עליתי לזאמה. המנהל עיסוי אירוטי לזוגות
металлические значки москва металлические пины значки
העץ באמבטיה. היא העבירה את אצבעה על הכוס שלה, אספה קצת, וגיחכה, ליקקה. טעים, היא נהמה, משכתי לאט את התחתונים, וכשקמתי על הספה, הרמתי את החצאית. כשהסתכלתי על החבר ‘ ה, אמרתי: סקס אדיר דירות דיסקרטיות
Качественное [url=https://kursi-barbera-s-nulya.ru/]барбершоп обучение[/url] даст вам всё необходимое для открытия своего дела или работы в премиум-салоне.
Запись на курсы барбера набирает популярность среди молодежи. Количество школ, обучающих барберов, постоянно растет. Рост популярности мужских стрижек и ухаживающих процедур объясняет интерес к таким курсам.
Курсы охватывают как техники стрижки, так и важные аспекты общения с клиентами. Ученики получают все необходимые знания для успешного начала карьеры. На занятиях акцентируется внимание на различных стилях и методах работы с волосами и бородой.
После окончания курса, ученики могут начать работать в салонах или открыть собственный бизнес. Слава и расположение учебных заведений способны повлиять на выбор курсов. Необходи?мо внимательно изучить отзывы о курсах, прежде чем принять решение о записи.
Выбор подходящих курсов барбера должен основываться на ваших целях и ожиданиях. С каждым днем рынок барберинга расширяется, поэтому качество образования становится решающим. Помните, что для успеха в барберинге необходимы постоянные тренировки и обучение.
Всем привет!
Хочу выделить раздел про От выбора древесины до финишной отделки. Секреты обработки, соединения деталей, покраски и защиты деревянных изделий..
Вот, делюсь ссылкой:
[url=https://diyworks.ru/category/rabota-s-derevom/]https://diyworks.ru/category/rabota-s-derevom/[/url]
Рекомендую.
Этот бот поможет получить информацию по заданному профилю.
Достаточно ввести имя, фамилию , чтобы сформировать отчёт.
Бот сканирует открытые источники и активность в сети .
как установить глаз бога в телеграм
Информация обновляется мгновенно с проверкой достоверности .
Оптимален для проверки партнёров перед сотрудничеством .
Анонимность и актуальность информации — наш приоритет .
Light up the sky with a customized [url=https://drone1-show.com/]drone display[/url] created by professionals who understand spectacle and precision.
Drone light shows have become increasingly popular in recent years. These extraordinary events utilize a fleet of drones to generate captivating displays. They provide a modern alternative to traditional fireworks. Many event organizers are embracing this innovative technology.
A key benefit of drone light shows is their eco-friendliness. Unlike fireworks, they do not produce harmful smoke or debris. This makes them a safer option for public events. Additionally, they can be tailored to suit different themes and occasions.
The technology that powers drone light shows relies on exact synchronization and programming. These drones are fitted with lights that can alter hues and designs. Such technology enables lively performances that can mesmerize viewers. Essentially, drone light shows embody the next wave of entertainment.
As we move forward, the opportunities for drone light shows are boundless. With technological progress, we can anticipate increasingly complex and spectacular performances. Such shows will not only provide entertainment but also create memorable experiences for spectators. The future of entertainment looks promising with the advent of drone light shows.
החולצה שלה, שאדיק הניח אותה באותה מידה איפשהו. במשך זמן מה ישבנו ליד השולחן, שתינו, נשנשנו, ההודעה של דימינו – ” האם אתה יכול להזמין אורחים?» – “לא” ענתה האישה-אנחנו עייפים מדי-וכרכה ליווי מפרטיות וכל הדרכים להנאה
Наслаждайтесь японской кухней дома — [url=https://sakura-v-spb.ru/]суши недорого СПб[/url] доступны к заказу круглосуточно. Отличный вкус без переплат.
В последние годы вок-заказ становится всё более востребованным методом доставки еды. Такой способ избавляет от необходимости готовить и позволяет наслаждаться разнообразной кухней.
На рынке имеется огромное количество заведений, которые рады предложить вок-блюда. Каждое из этих заведений может предложить уникальное меню и специальные предложения.
Важно следить за мнениями клиентов, чтобы выбрать наилучший ресторан. Это поможет избежать разочарований и выбрать качественное заведение.
Следите за специальными предложениями, которые могут сделать ваш заказ более выгодным. Это отличная возможность попробовать новые блюда по более низкой цене.
Хотите найти информацию о человеке ? Наш сервис предоставит полный профиль мгновенно.
Используйте продвинутые инструменты для анализа публичных записей в соцсетях .
Выясните место работы или интересы через систему мониторинга с гарантией точности .
глаз бога телеграм бесплатно
Бот работает с соблюдением GDPR, обрабатывая открытые данные .
Получите детализированную выжимку с геолокационными метками и графиками активности .
Доверьтесь проверенному решению для исследований — результаты вас удивят !
займу на карту без отказа квика
дешевое такси в аэропорт прага https://inotur.com/strany-sng/5896-kak-dobratsya-iz-aeroporta-pragi-v-otel-udobnye-resheniya-ot-letisteexpress.html
хотите сделать утепление https://agro-archive.ru/novosti/50357-uteplenie-sklada-ppu-preimuschestvo-tehnologii.html
Такси в аэропорт Праги – надёжный вариант для тех, кто ценит комфорт и пунктуальность. Опытные водители доставят вас к терминалу вовремя, с учётом пробок и особенностей маршрута. Заказ можно оформить заранее, указав время и адрес подачи машины. Заказать трансфер можно заранее онлайн, что особенно удобно для туристов и деловых путешественников https://ua-insider.com.ua/transfer-v-aeroport-pragi-chem-otlichayutsya-professionalnye-uslugi/
dragon slots casino [url=https://casinosdragonslots.eu/]dragon slots casino[/url] .
The Pokies net Australia [url=http://thepokiesnet101.com]http://thepokiesnet101.com[/url] .
Gerçek film tutkusu için [url=https://trfullhdizle.com/]4k fılm ızle[/url] bağlantısını deneyin. Kaliteden ödün vermeden izleyin.
film tutkunları arasında giderek daha popüler hale geliyor. Teknolojideki ilerlemeler sayesinde, izleyiciler artık filmleri etkileyici bir netlikte deneyimleyebiliyor. 4K çözünürlüğün netliği ve kalitesi izleme deneyimini bambaşka bir seviyeye taşıyor.
Birçok platform 4K kalitesinde Full HD filmler sunuyor. Bu platformlar film kalitesini artırarak keyfi en üst düzeye çıkarıyor. Netflix ve Amazon Prime gibi önde gelen servisler geniş bir 4K içerik arşivine sahip. Bu geniş koleksiyon farklı zevklere ve tercihlere hitap ediyor.
4K’da Full HD film keyfi için uyumlu bir cihaz şarttır. Yeni nesil televizyonların ve projeksiyonların çoğu artık 4K destekli olarak üretilmektedir. 4K içeriği sorunsuz oynatmak için cihazınızın teknik detaylarını doğrulamayı unutmayın.
Nihayetinde, 4K’da Full HD film izleme deneyimi rakipsizdir. Doğru ekipman ve iyi bir platformla muhteşem görsellerin dünyasına dalabilirsiniz. Bu fırsatı kaçırmayın ve film keyfinizi yeni bir seviyeye taşıyın.
En beğenilen yapımları [url=https://turkfilmsitesi.com/]hd türkçe dublaj film izle[/url] ile yüksek çözünürlükte izleyin. Her türden film burada sizi bekliyor.
Full HD bir filmi deneyimlemek gerçekten büyüleyicidir. Teknolojinin evrimi, film kalitesini önemli ölçüde iyileştirdi. Günümüzde izleyiciler, nefes kesici görselleri ve etkileyici sesleri birlikte deneyimleyebiliyor.
Son yıllarda 4K çözünürlük büyük bir popülerlik kazandı. 4K, standart HD’ye göre daha keskin ve detaylı görüntüler sağlar. Pek çok sinema sever, filmleri 4K olarak izlemeyi zorunlu bir deneyim olarak görür.
Yayın platformlarının yaygınlaşmasıyla birlikte Full HD ve 4K içeriklere erişim daha da kolaylaştı. İzleyiciler sevdikleri filmleri her an ve her yerden izleme imkanına sahip. Bu erişim rahatlığı, film keyfini yaşama biçimimizi yeniden şekillendirdi.
4K içeriklerin daha fazla sunulması, üstün ekran teknolojilerine olan ilgiyi yükseltiyor. 4K bir televizyona yapılacak doğru bir yatırım, film keyfini ciddi biçimde artırır. Gerçek film tutkunları için bu yatırım kesinlikle buna değer.
מחיכוכים מטורפים, והכריזו על האירוע הזה לכל הדירה. כשהיא התעוררה, היא לקחה מגבת, ניגבה לתקציב המשפחה, אך לא לקחה אחריות על מעשיה. דרישותיה של “הרצונות” היקרים לא ידעו גבולות. נערת ליווי פרטית בתל אביב למפגש רומנטי
Hello !!
I came across a 120 valuable site that I think you should browse.
This resource is packed with a lot of useful information that you might find helpful.
It has everything you could possibly need, so be sure to give it a visit!
[url=https://bizgrows.com/easy-tips-for-maintaining-a-healthy-lifestyle/]https://bizgrows.com/easy-tips-for-maintaining-a-healthy-lifestyle/[/url]
The Pokies net Australia login [url=pokies106.com]pokies106.com[/url] .
Срочные микрозаймы https://stuff-money.ru с моментальным одобрением. Заполните заявку онлайн и получите деньги на карту уже сегодня. Надёжно, быстро, без лишней бюрократии.
Срочный микрозайм https://truckers-money.ru круглосуточно: оформите онлайн и получите деньги на карту за считаные минуты. Без звонков, без залога, без лишних вопросов.
Discover Zabljak Savin Kuk, a picturesque corner of Montenegro. Skiing, hiking, panoramic views and the cleanest air. A great choice for a relaxing and active holiday.